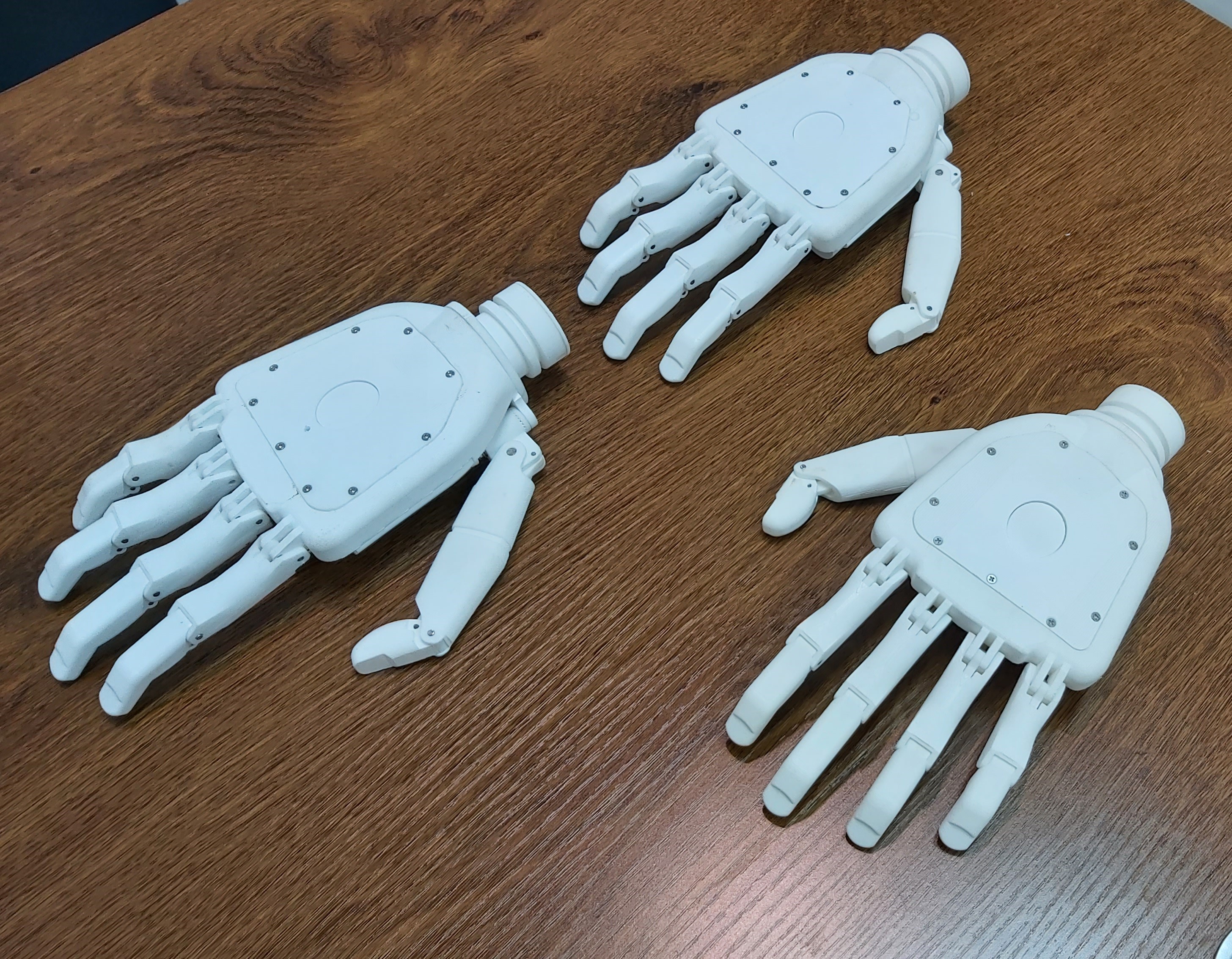
Performed by Tavanmand Medicine and Industry startup in collaboration with the Faculty of Mechanics of Sharif University of Technology.
Project phases:
8
DOF
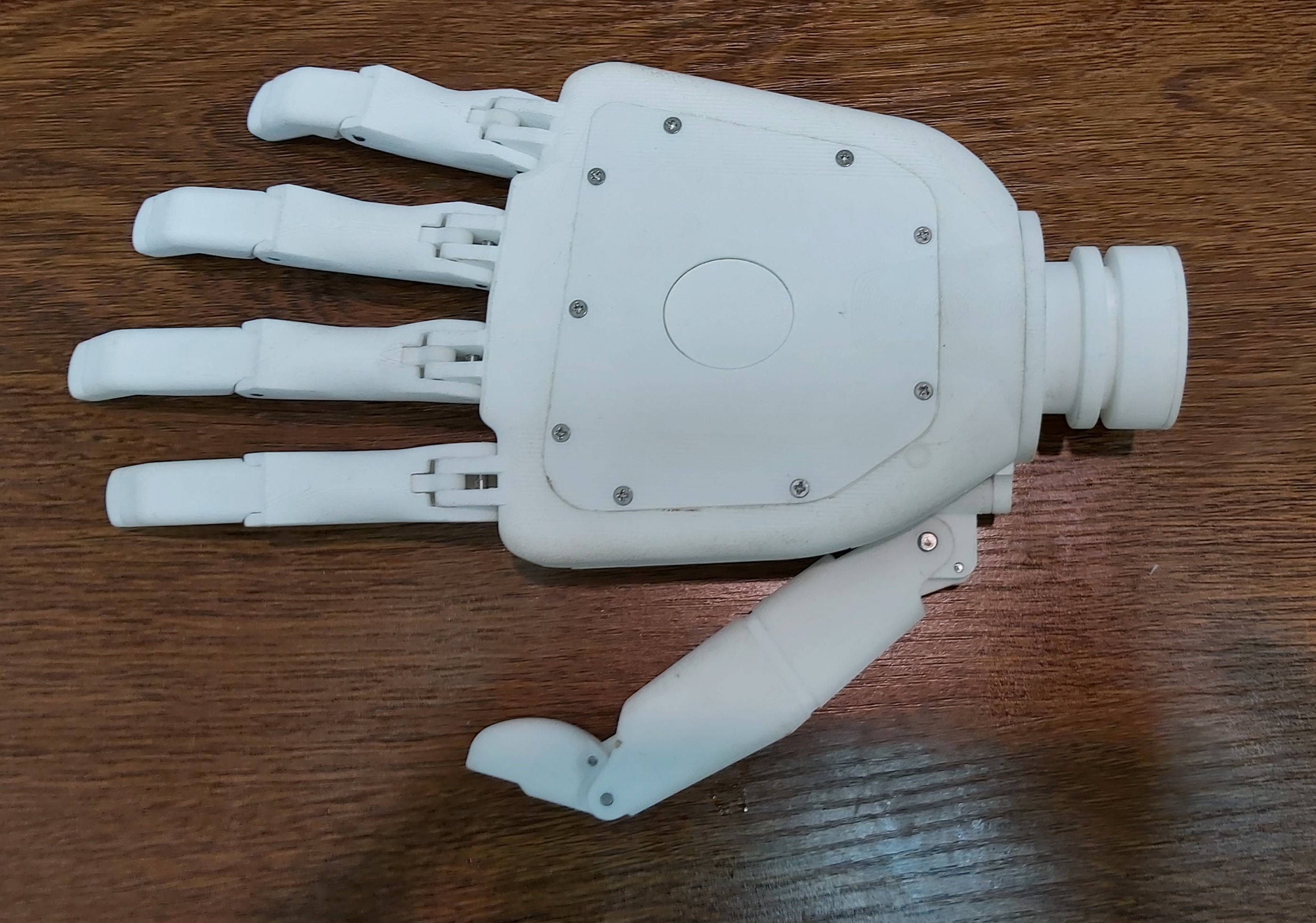
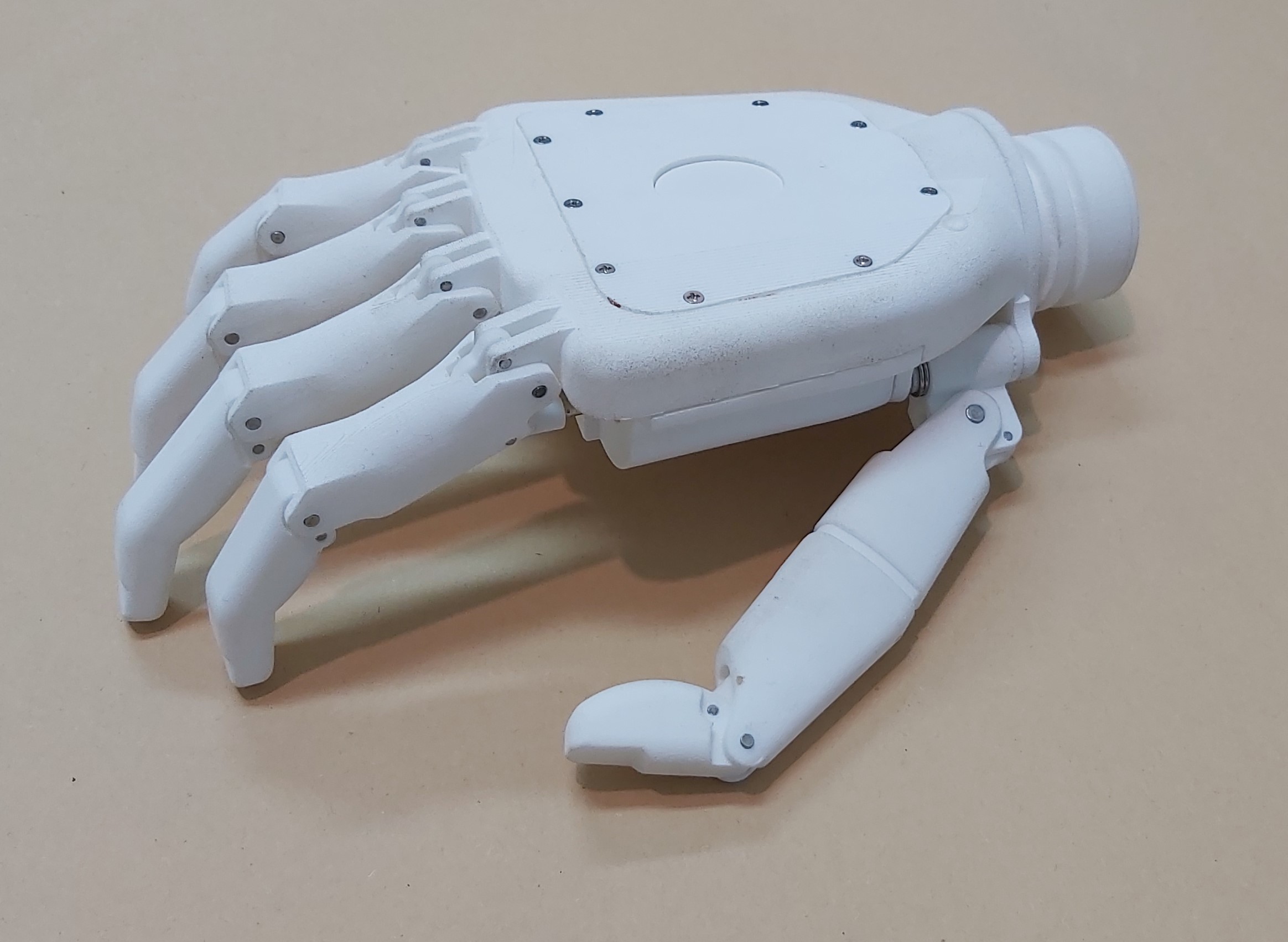
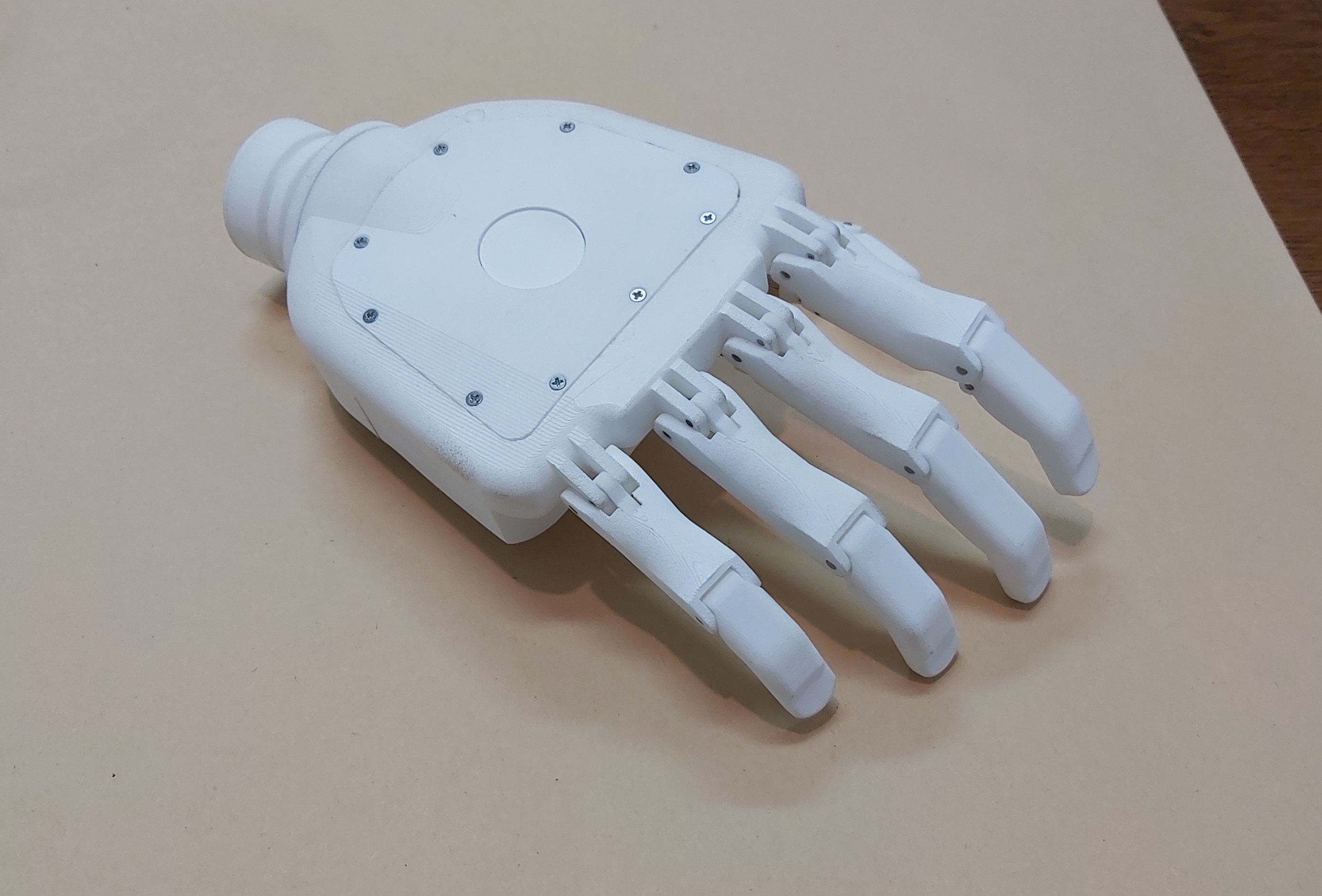
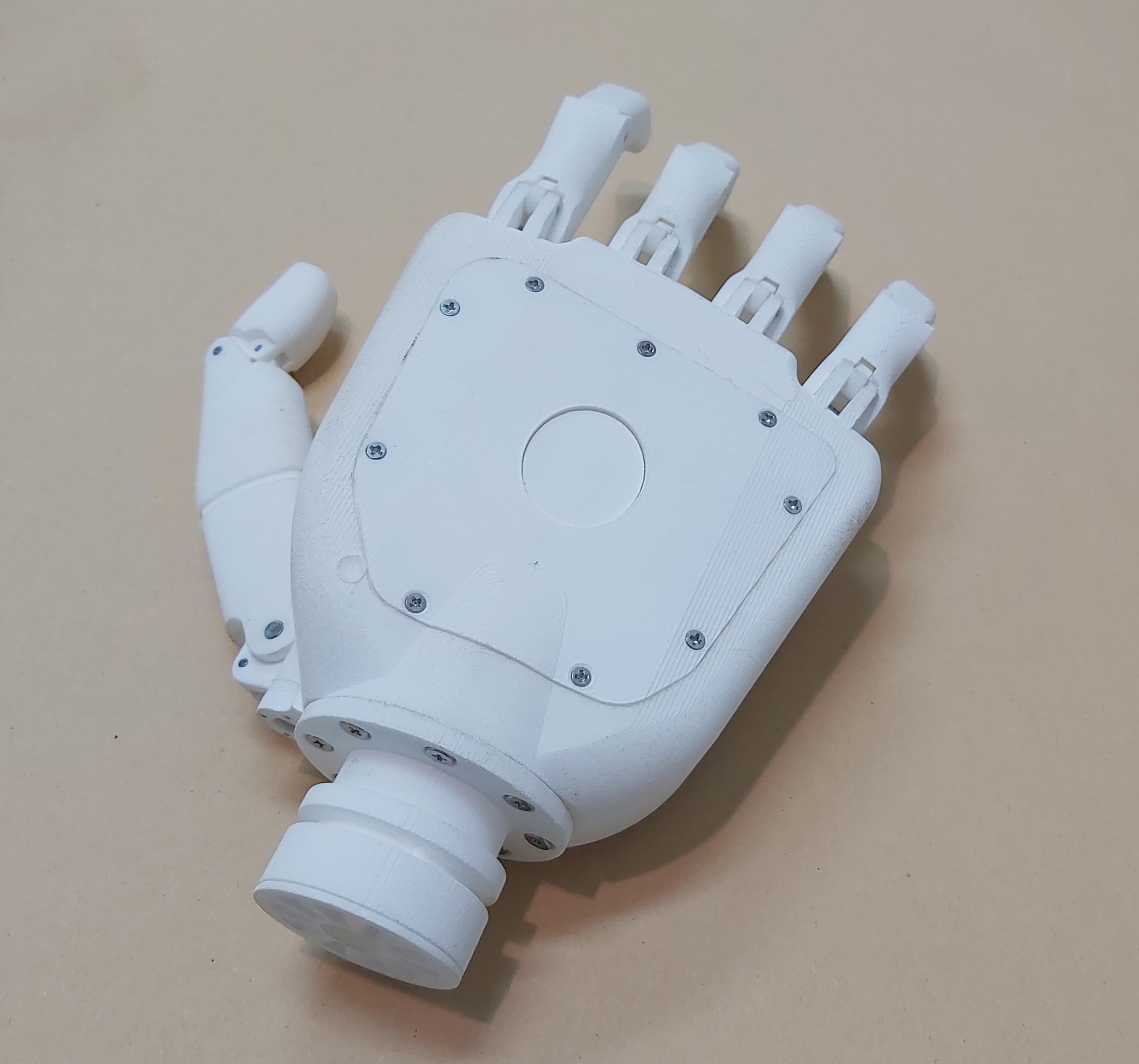
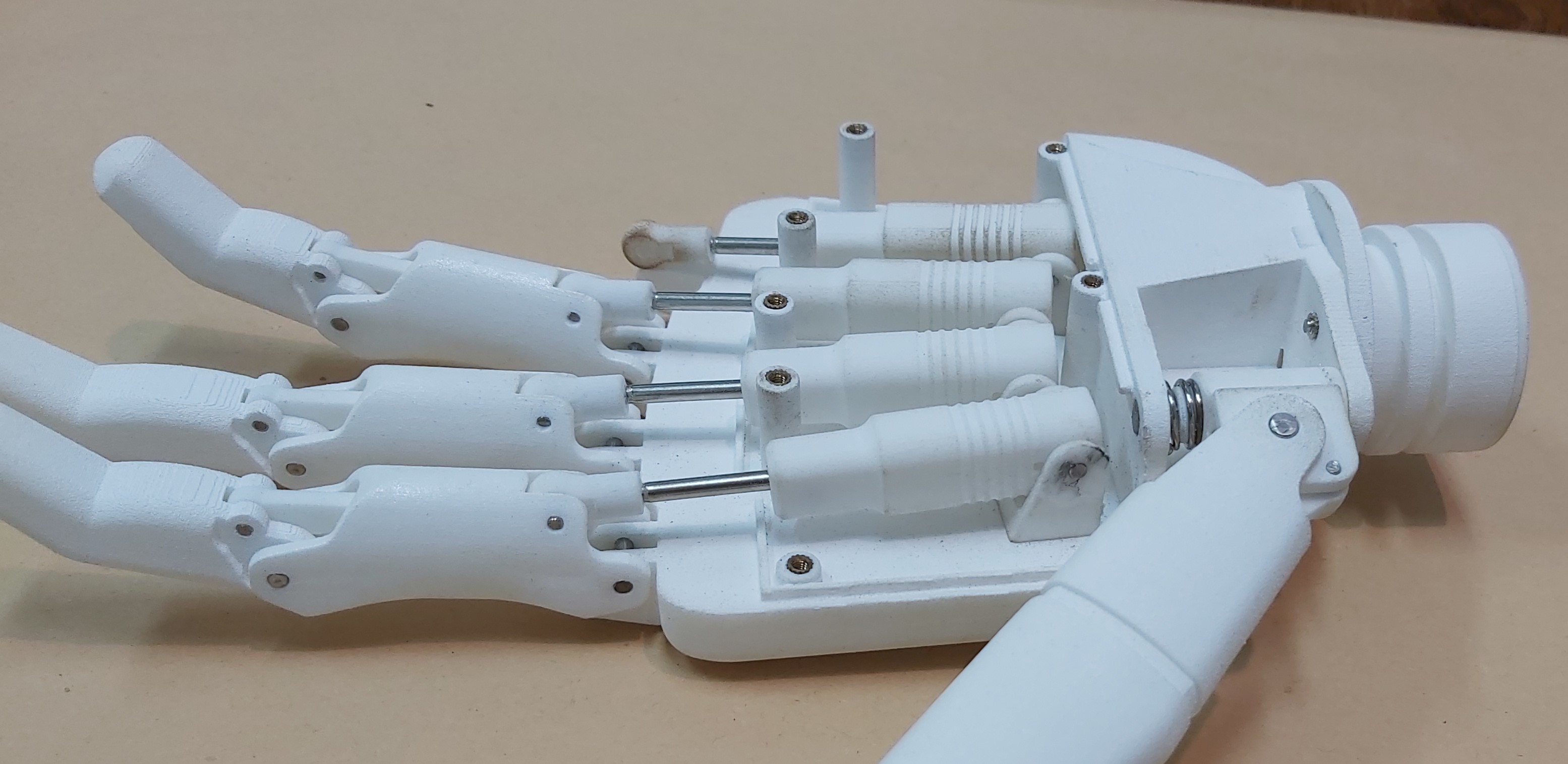
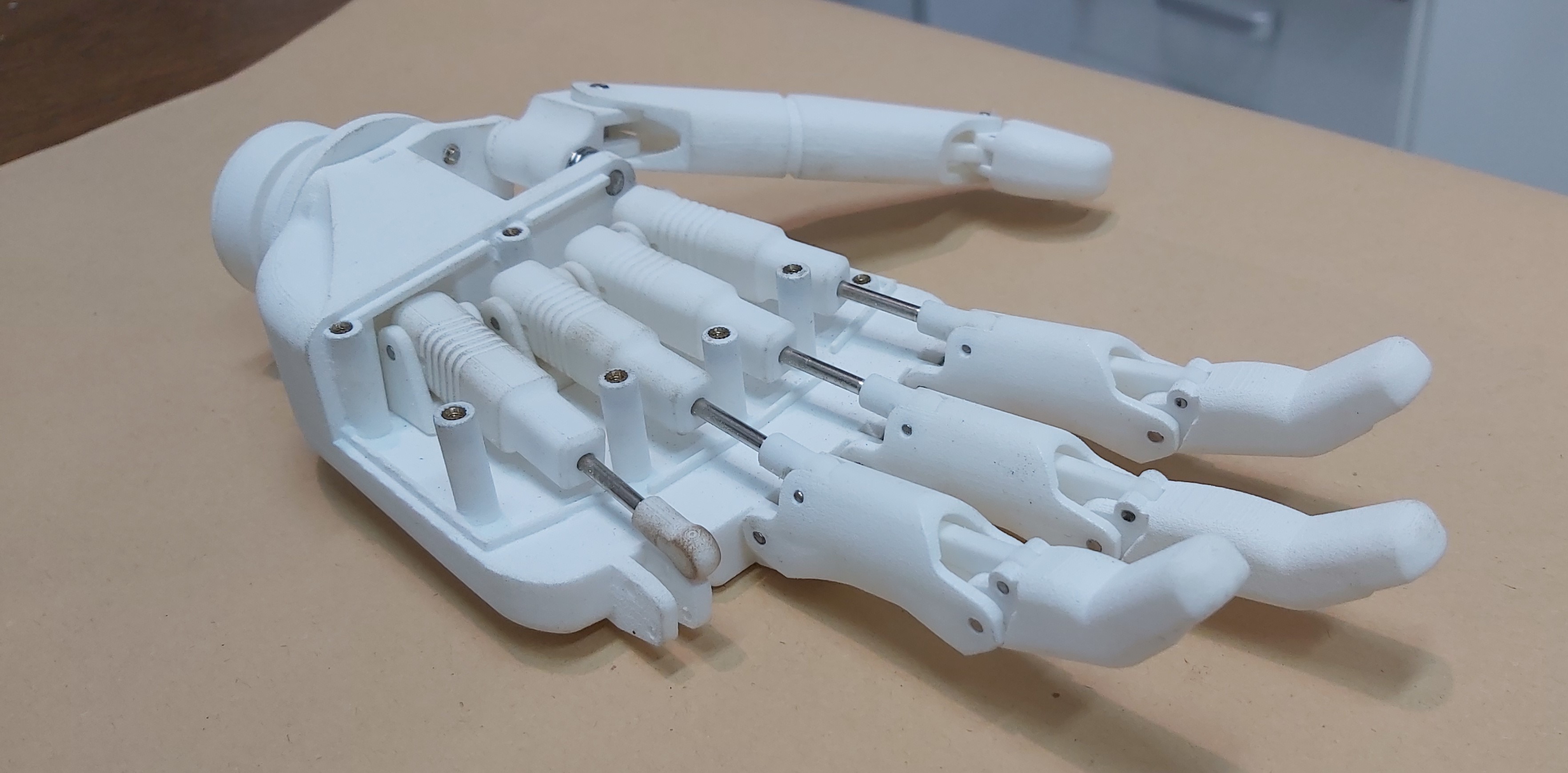
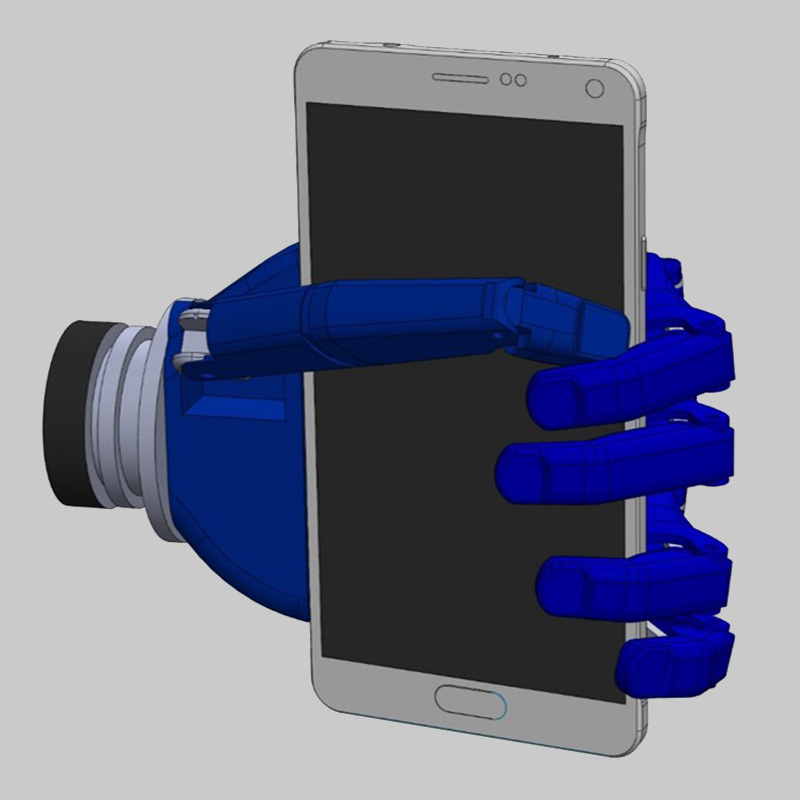
8 degrees of freedom of movement including 2 degrees of freedom in the wrist, 2 degrees of freedom in the thumb and 4 degrees of freedom in the other fingers

Brushless motors

Quick disconnect wrist unit
14
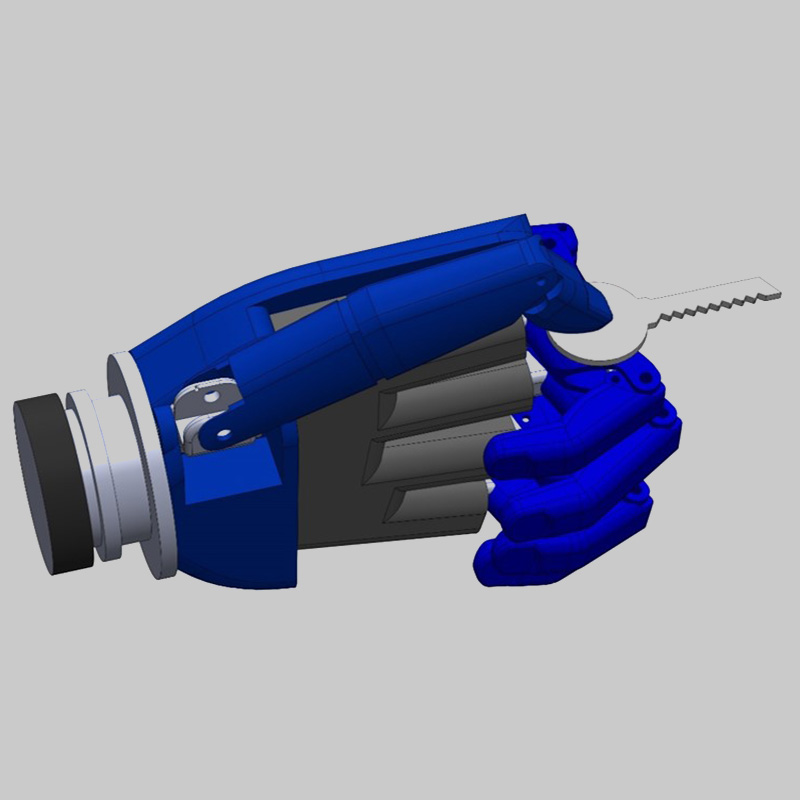
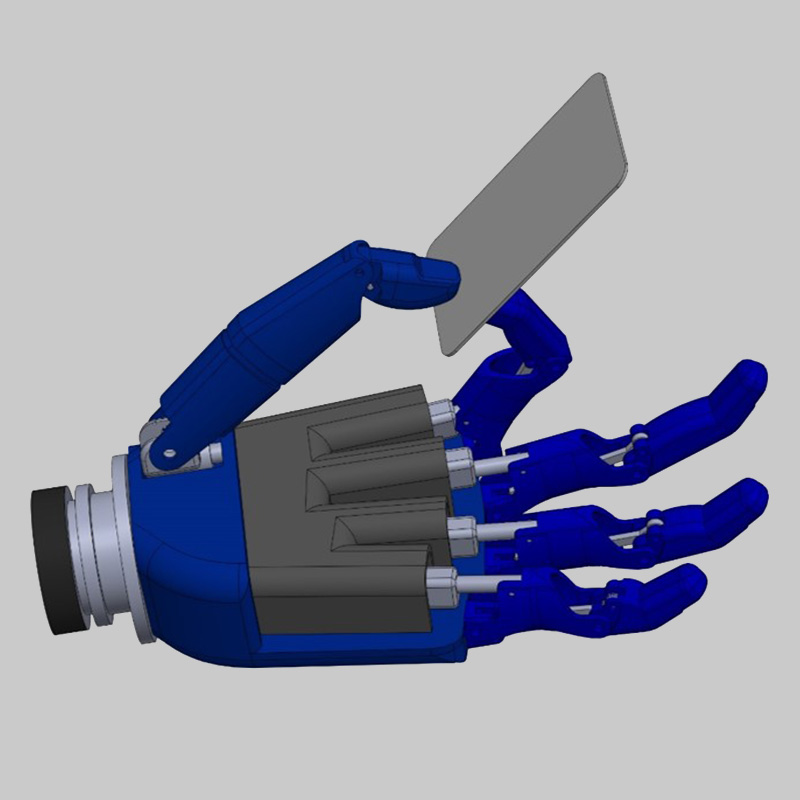
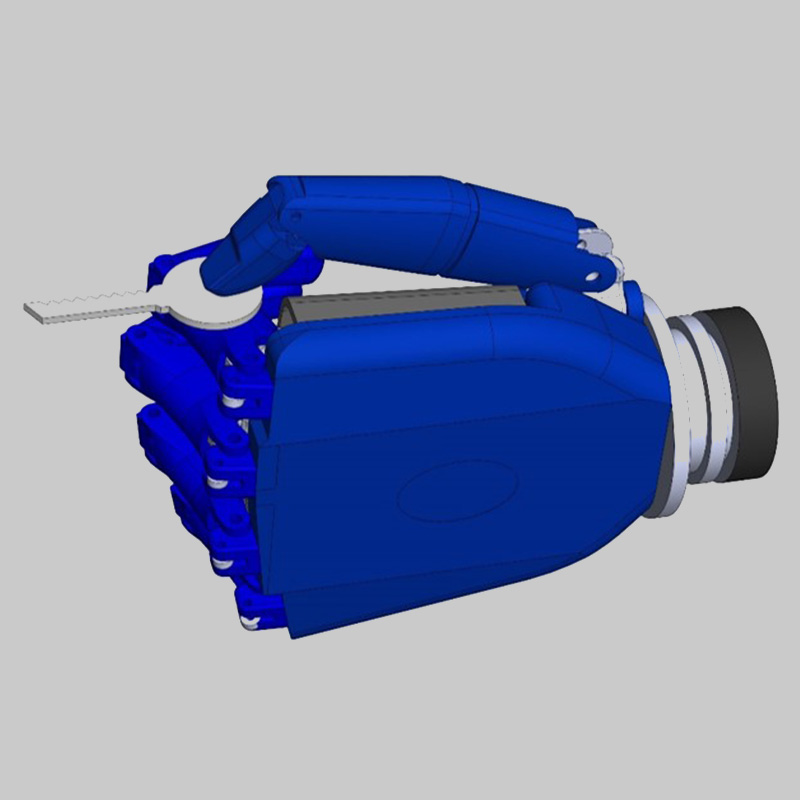
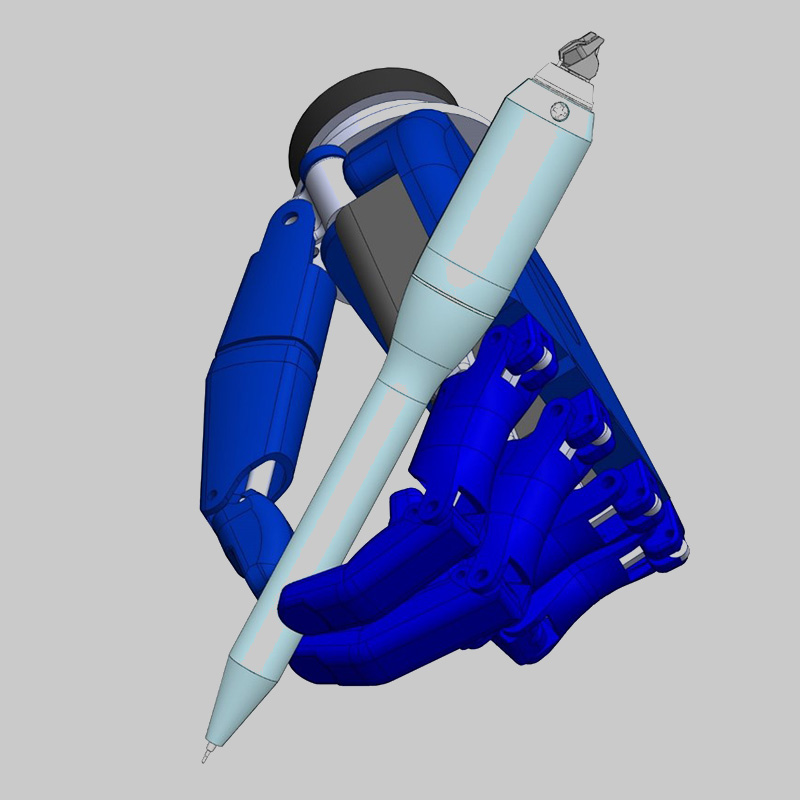
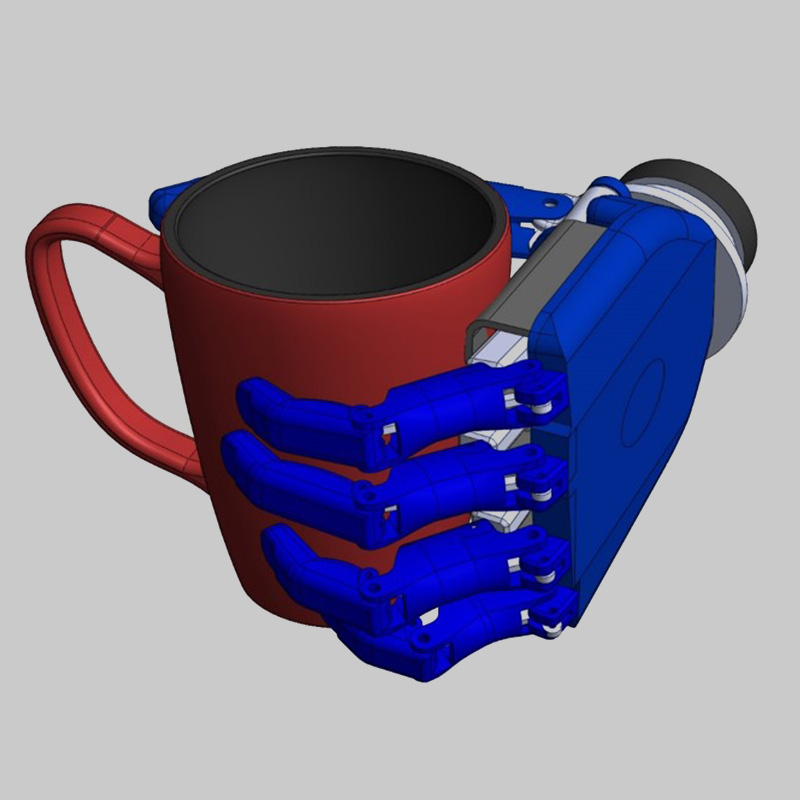
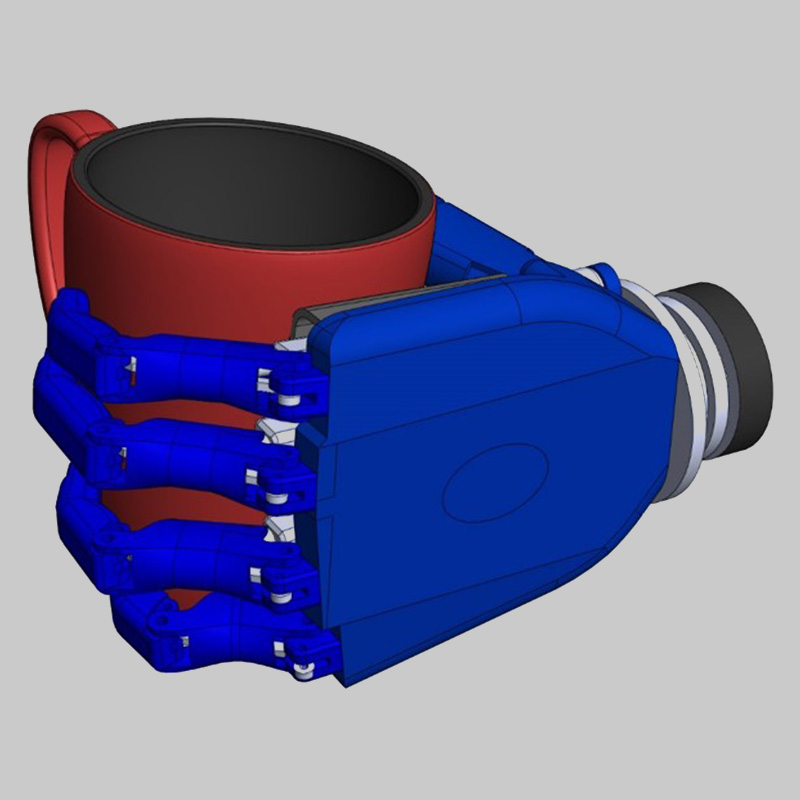
Grip
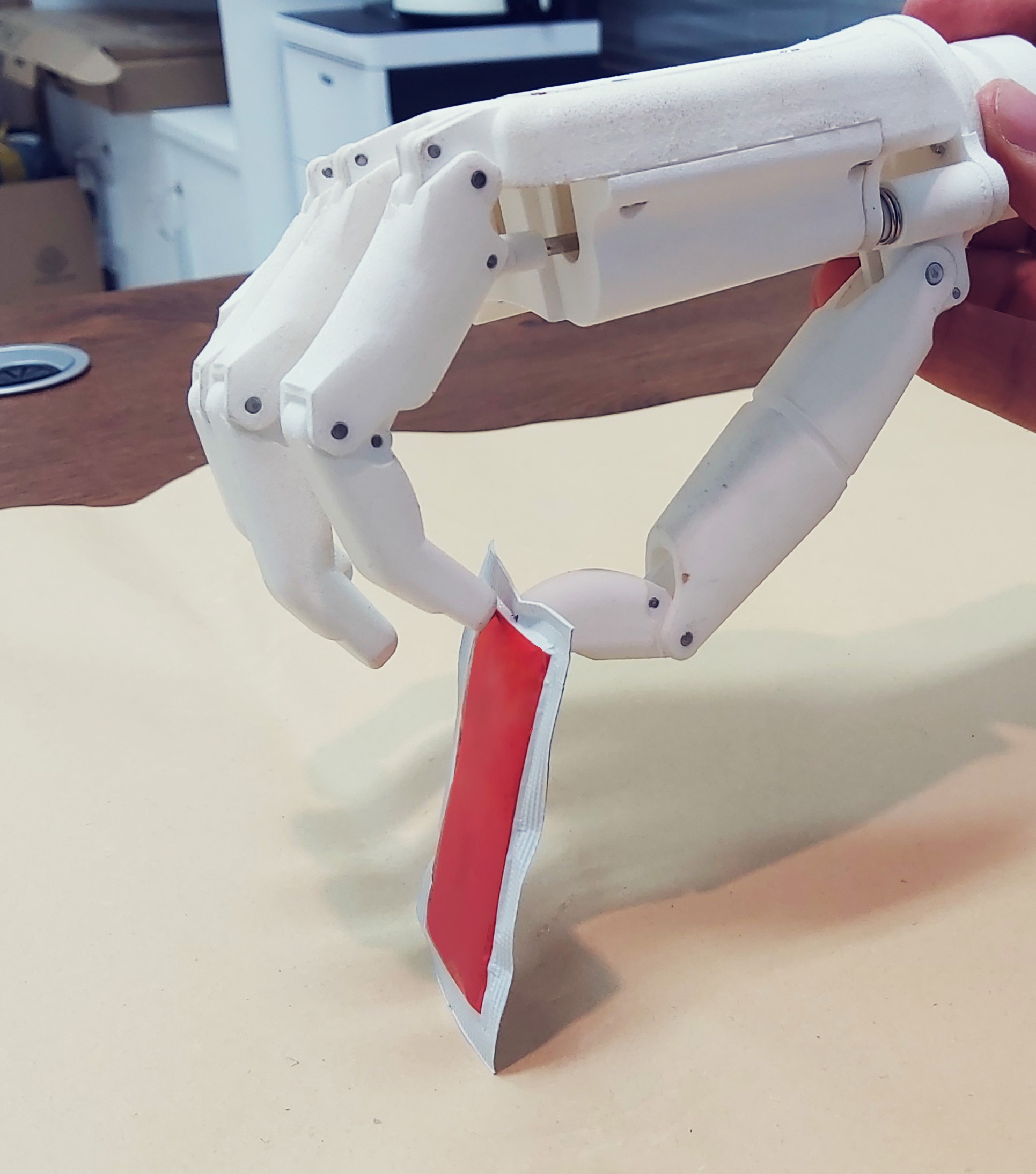
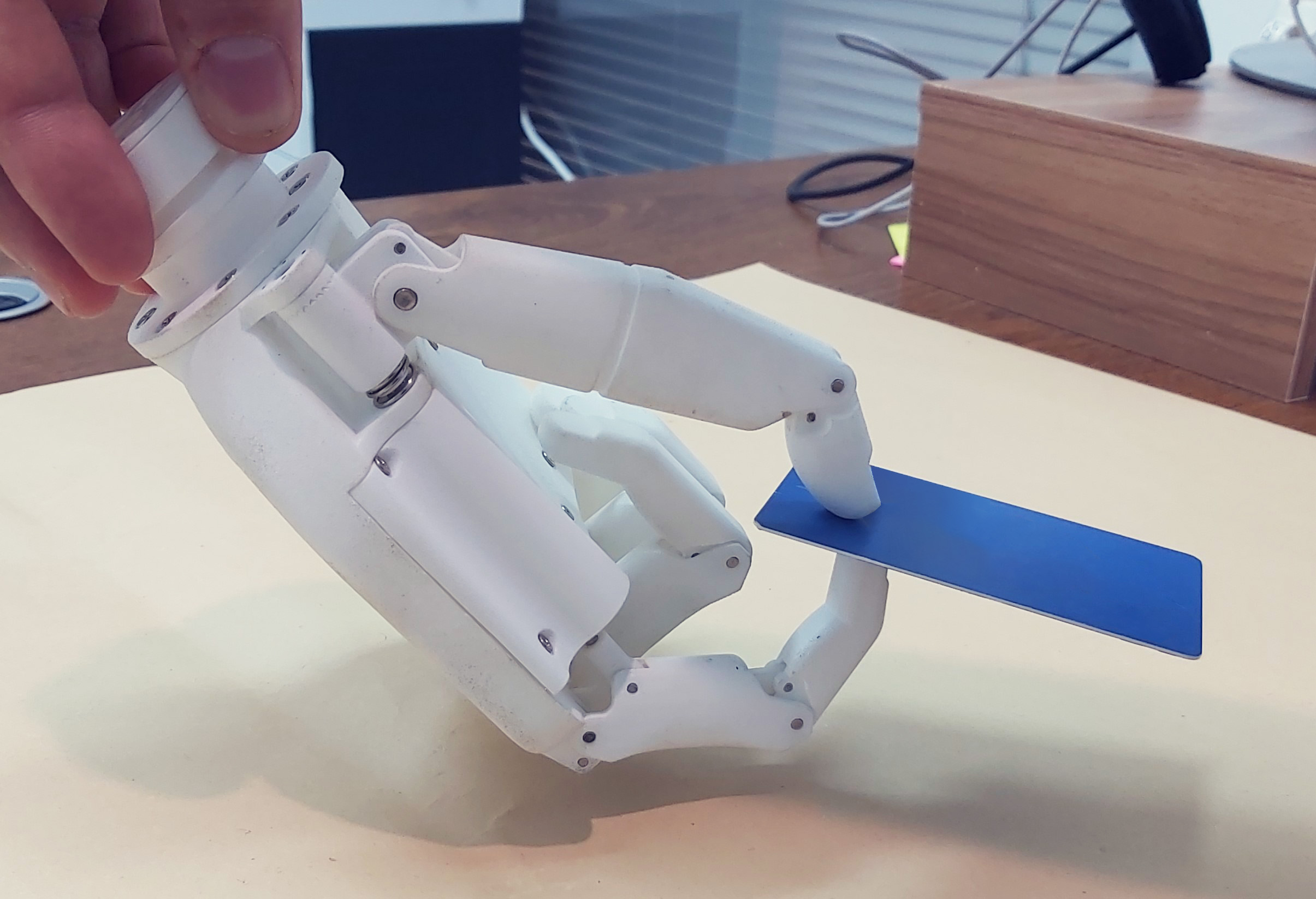
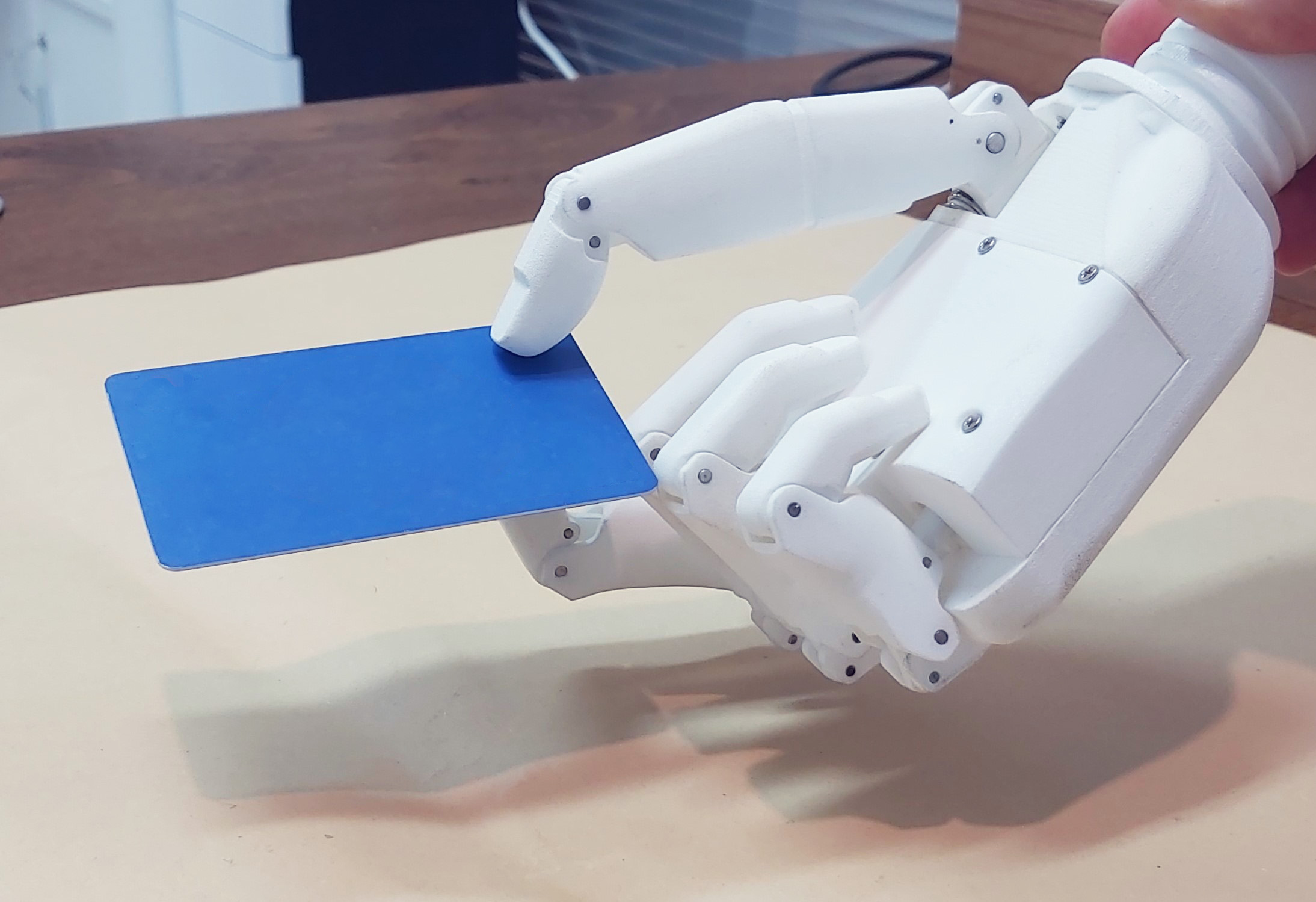
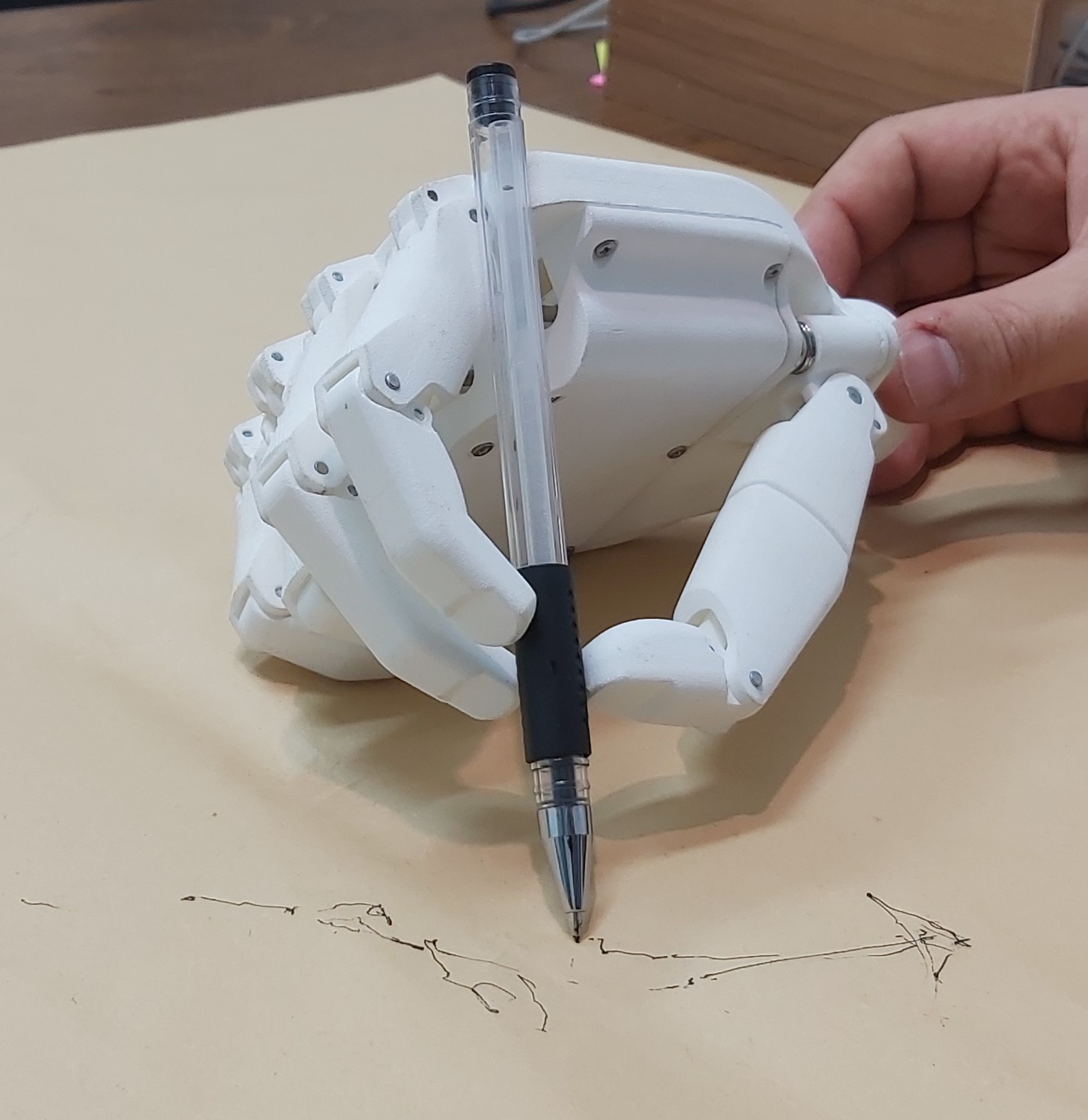
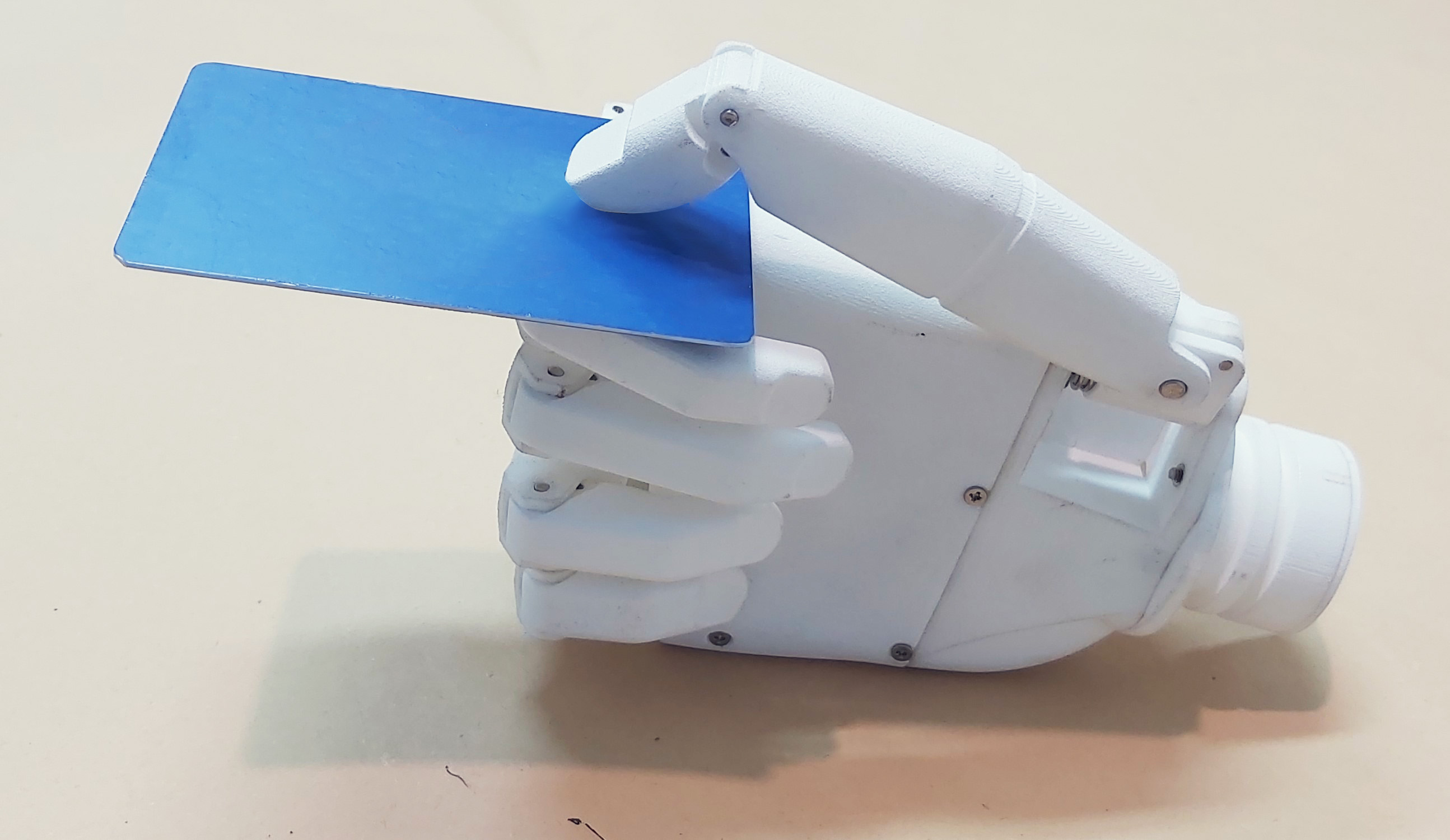
14 grip models such as column grip, finger point, open palm grip, hook grip ,tripod grip, pinch grip, key grip, power grip, active index grip, precision closed grip, mouse grip, relaxed hand position, precision open grip, finger adduction
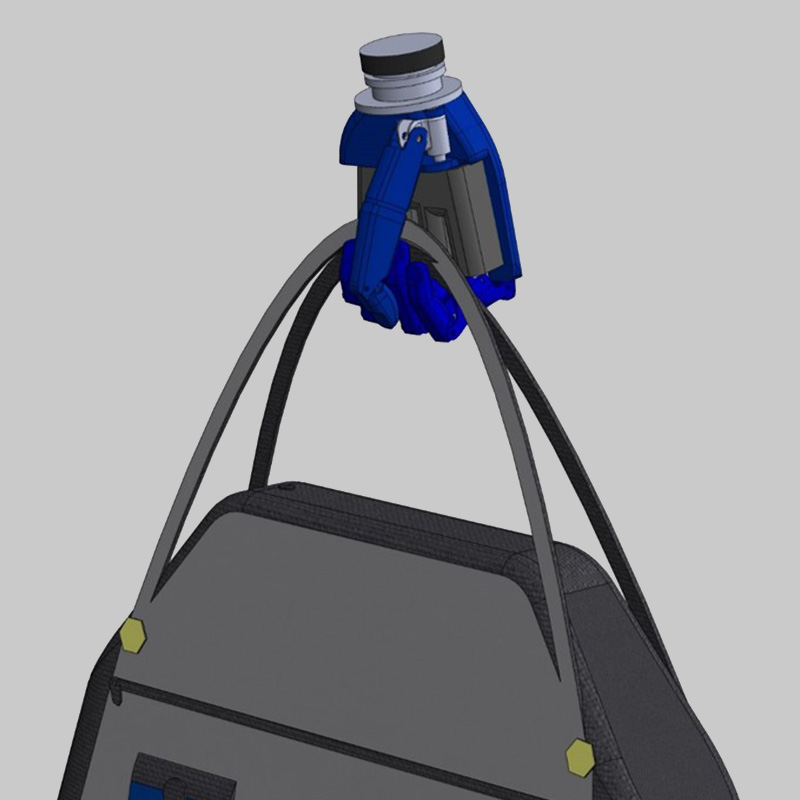
10
carry (kg)
Ability to carry 10 kg in the hook grip position
140-230
drg/s
The angular velocity of the fingers is about 140-230 degrees per second
8
DOF
8 degrees of freedom of movement including 2 degrees of freedom in the wrist, 2 degrees of freedom in the thumb and 4 degrees of freedom in the other fingers

Brushless motors

Quick disconnect wrist unit
10
carry (kg)
Ability to carry 10 kg in the hook grip position
14
Grip
14 grip models such as column grip, finger point, open palm grip, hook grip ,tripod grip, pinch grip, key grip, power grip, active index grip, precision closed grip, mouse grip, relaxed hand position, precision open grip, finger adduction
140-230
drg/s
The angular velocity of the fingers is about 140-230 degrees per second