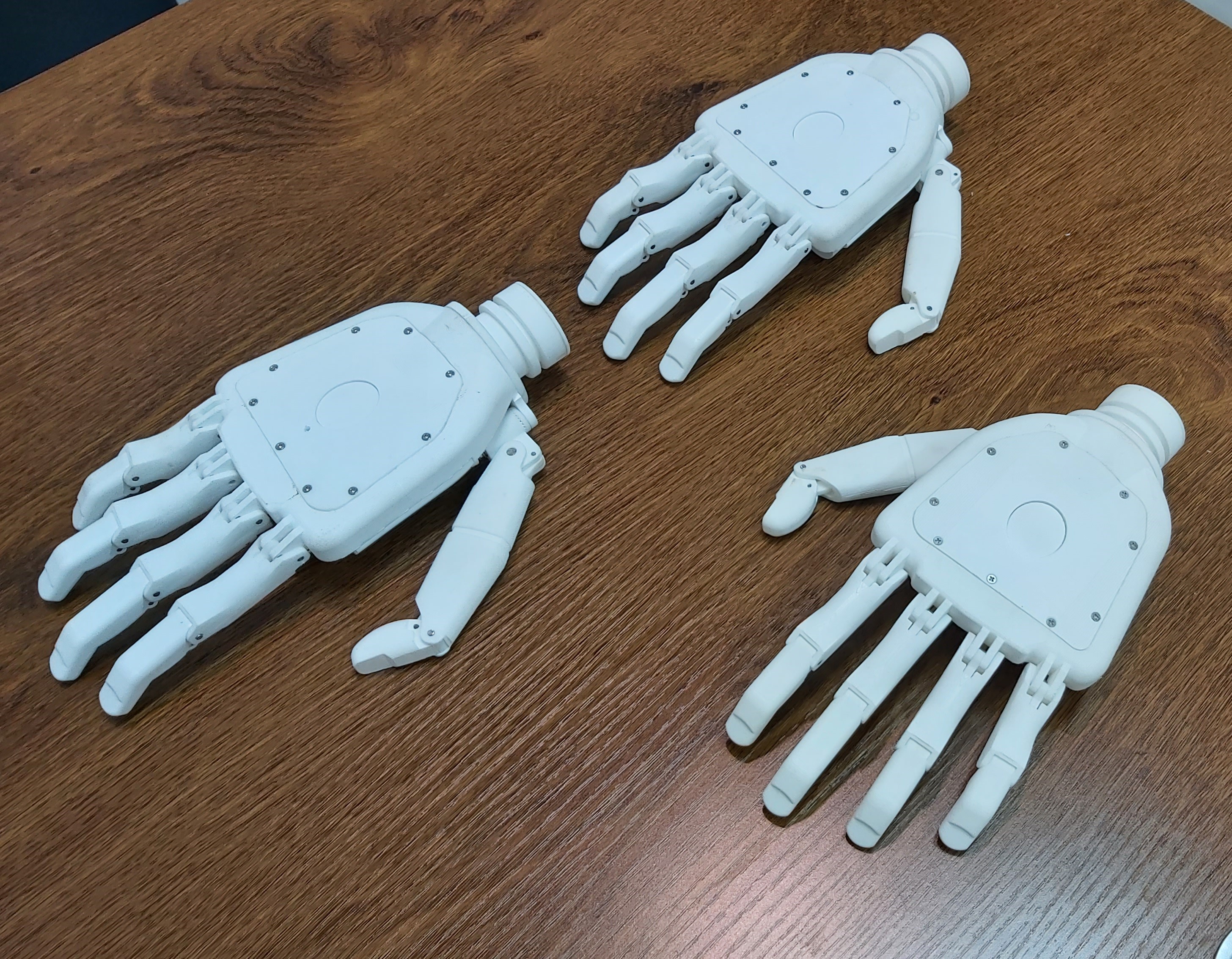
اجرا شده توسط شرکت طب و صنعت توانمند با همکاری مرکز تحقیقات طب فیزیکی و توانبخشی دانشگاه علوم پزشکی شهید بهشتی و دانشگاه صنعتی شریف.
فاز های پروژه:
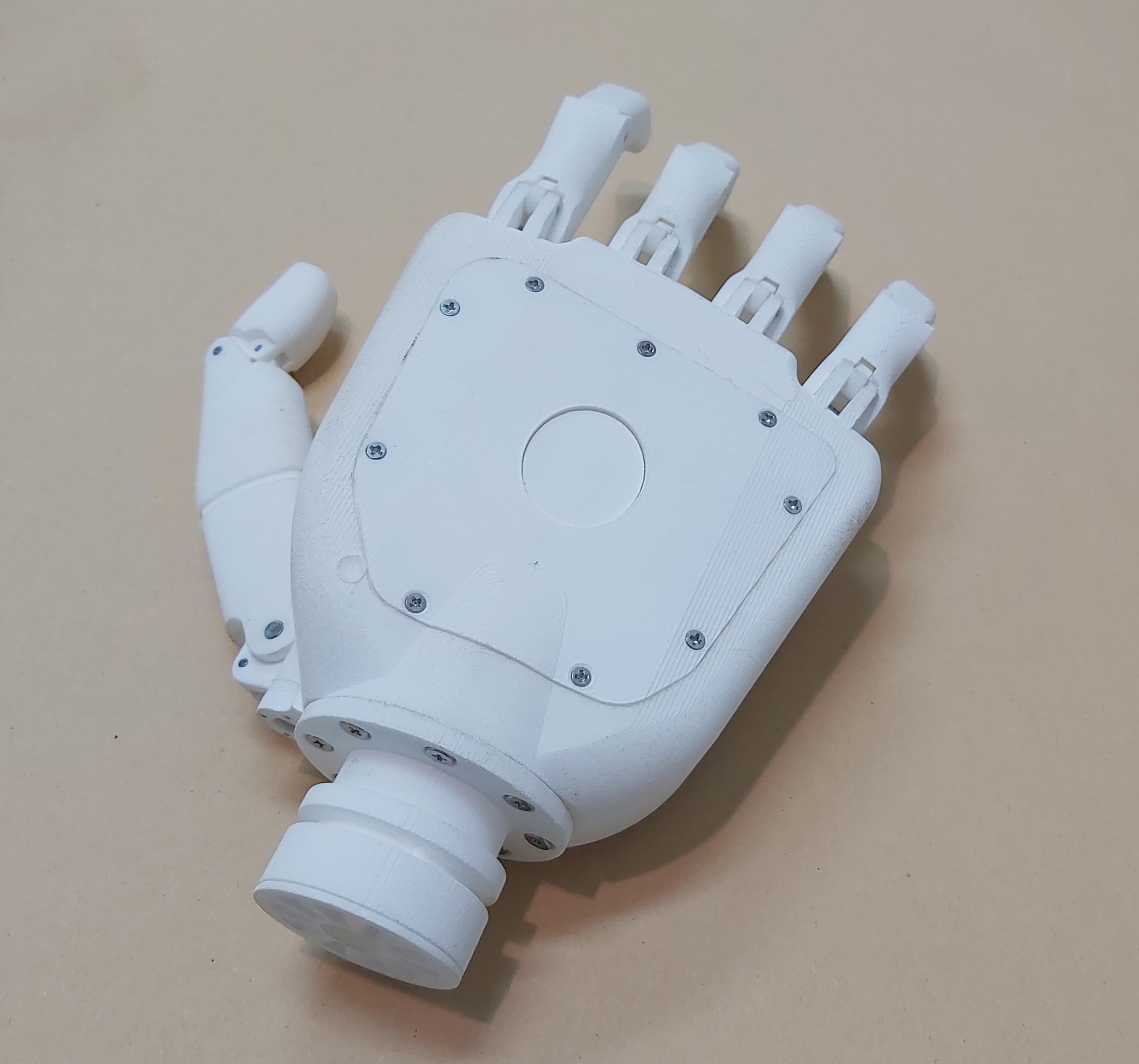
8
DOF
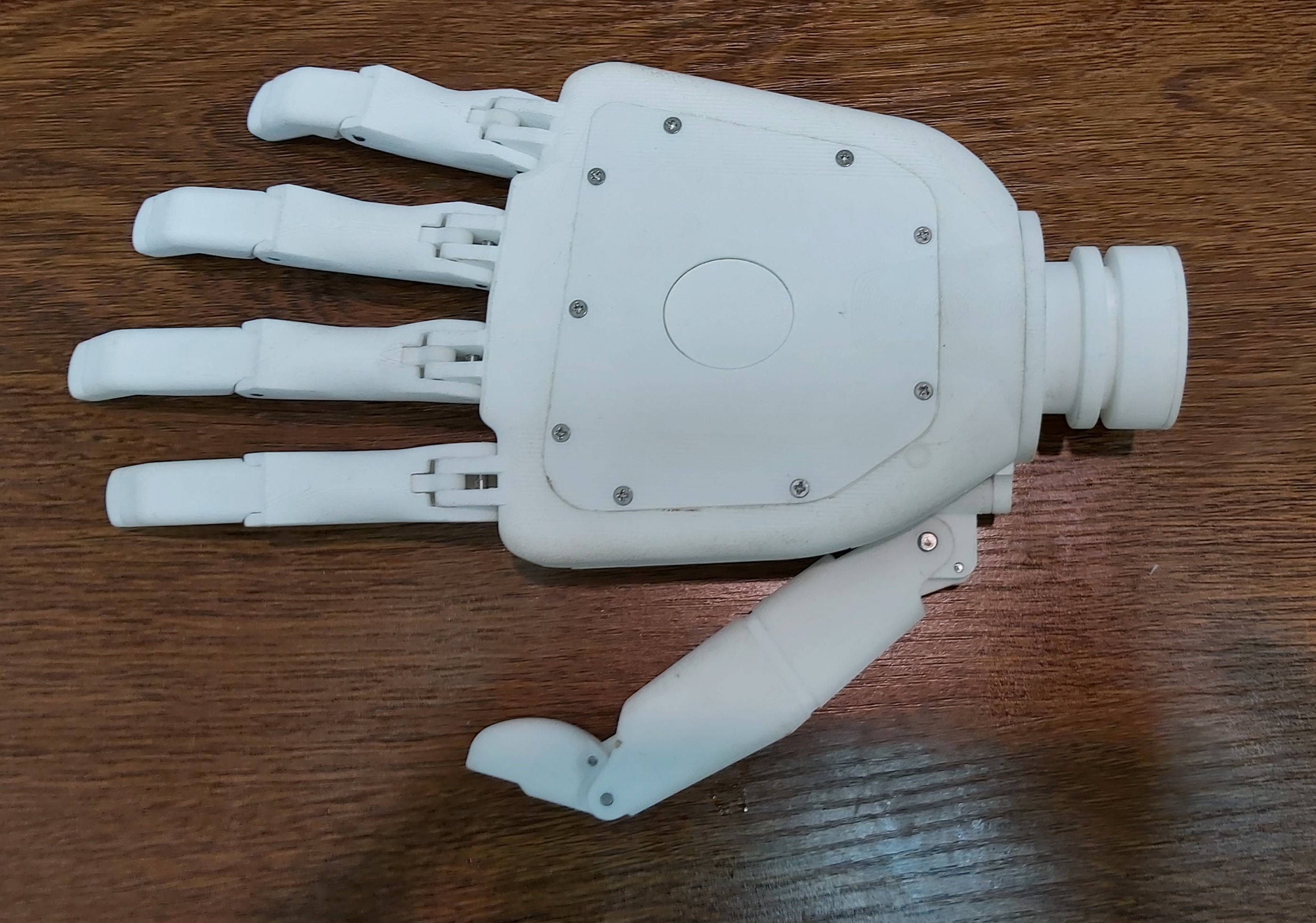
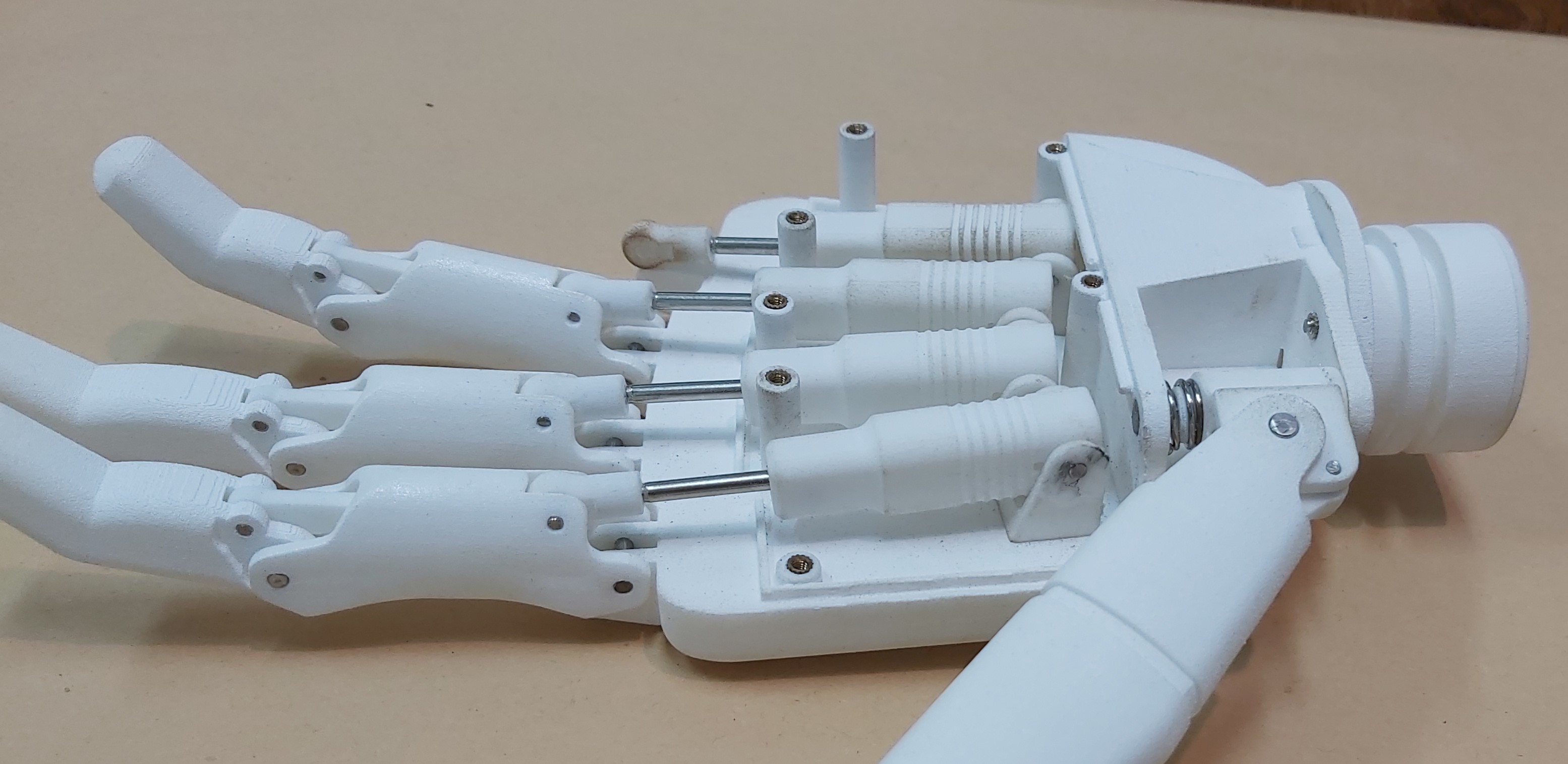
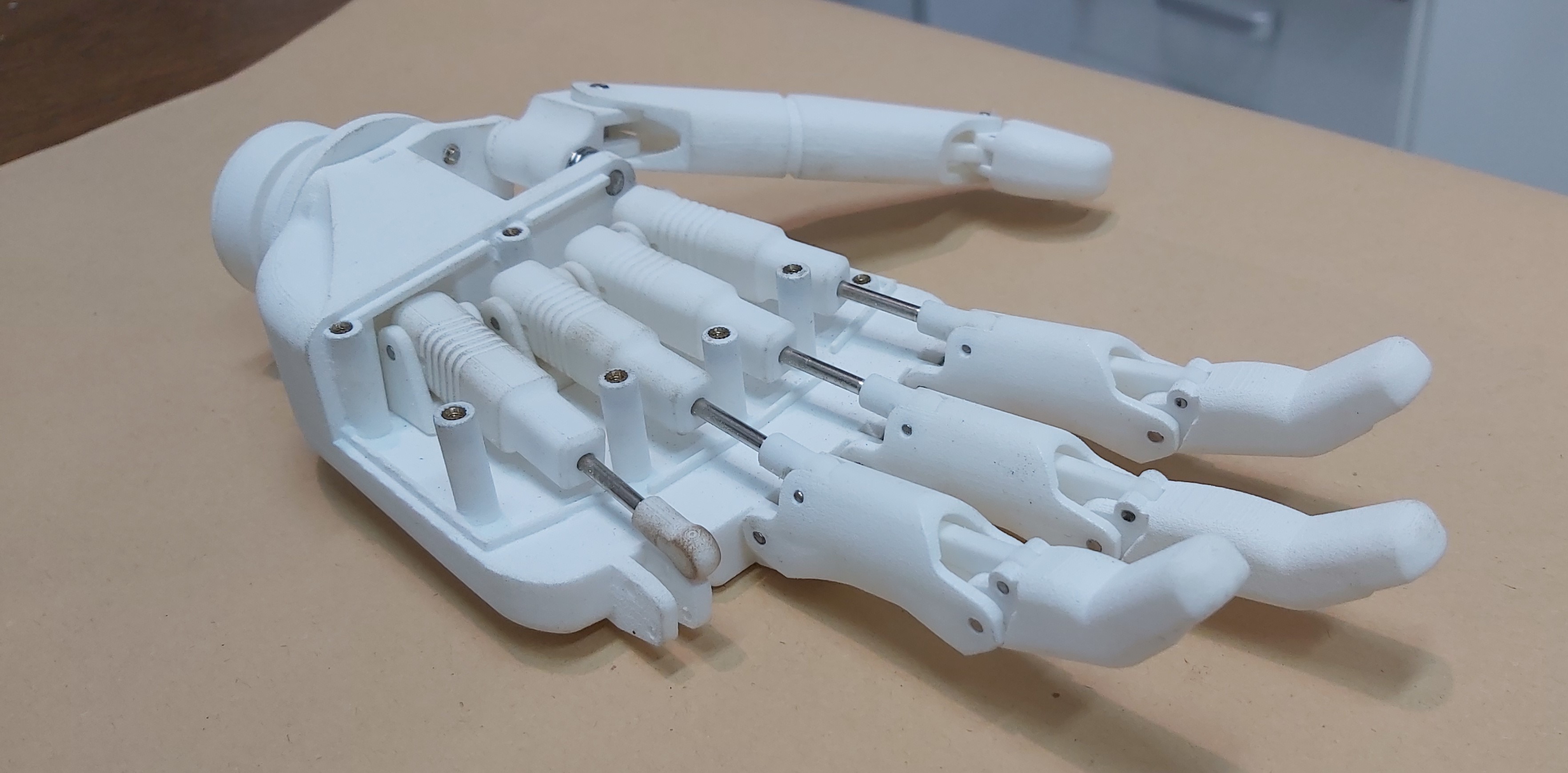
8 درجه آزادی حرکت شامل 2 درجه آزادی حرکت در مچ ،2 درجه در شست و 4 درجه در سایر انگشتان

بکارگیری موتور Brushless

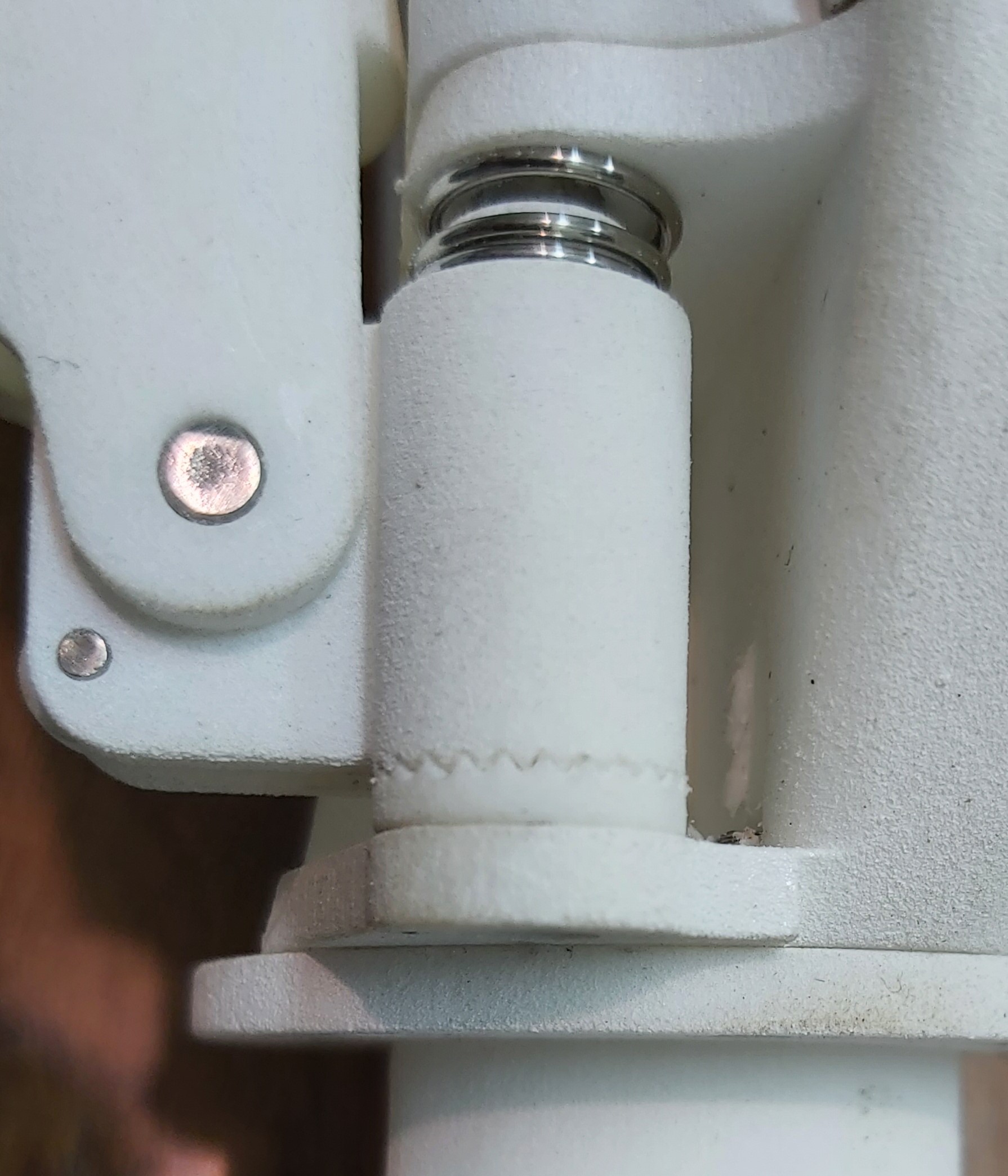
وجود unit Quick-disconnect
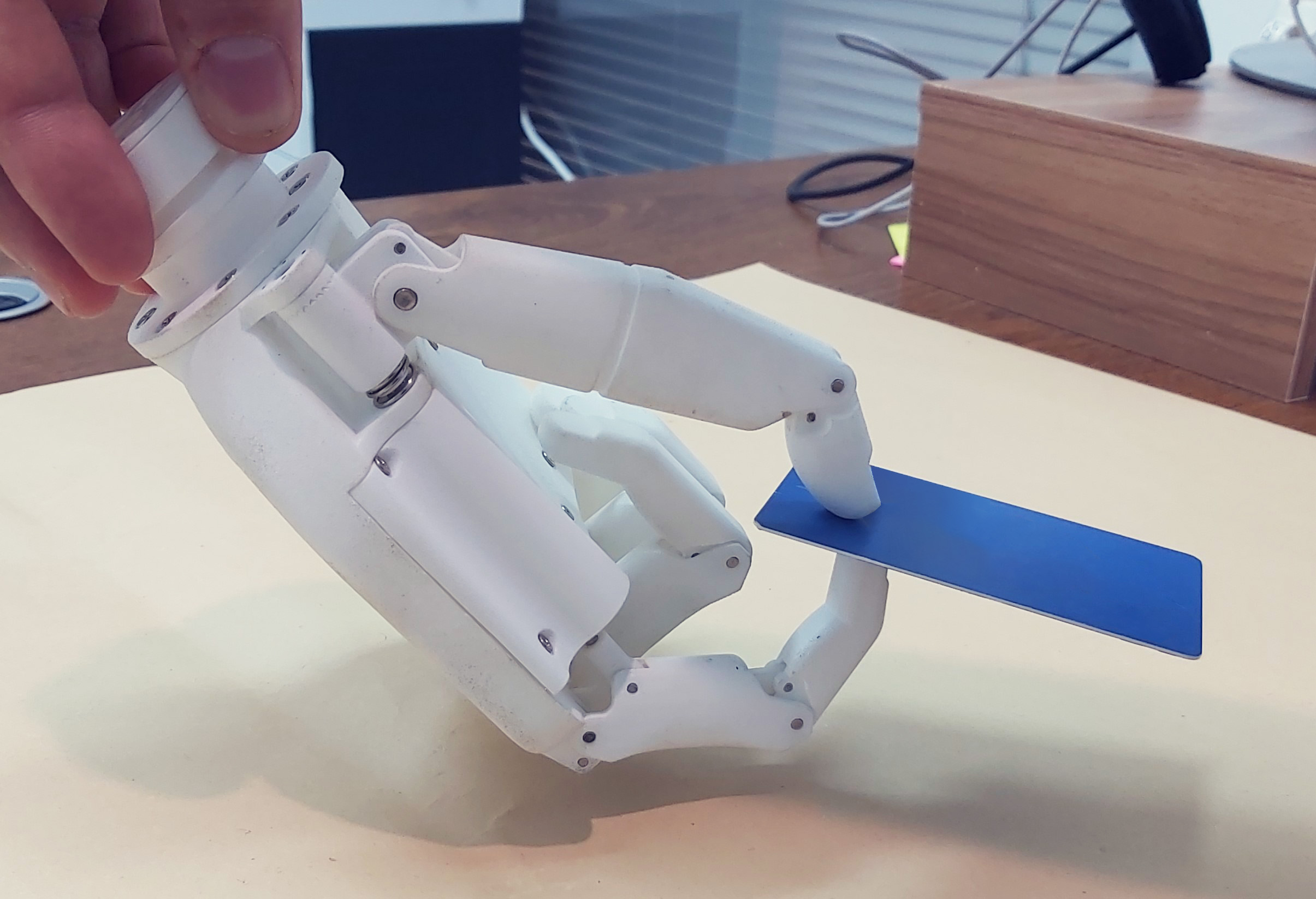
14
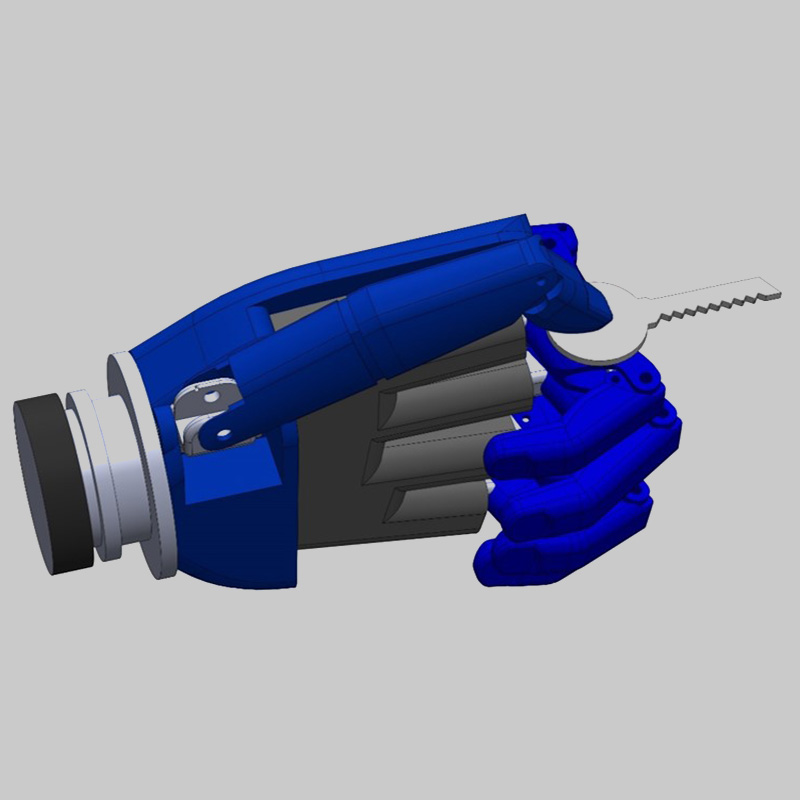
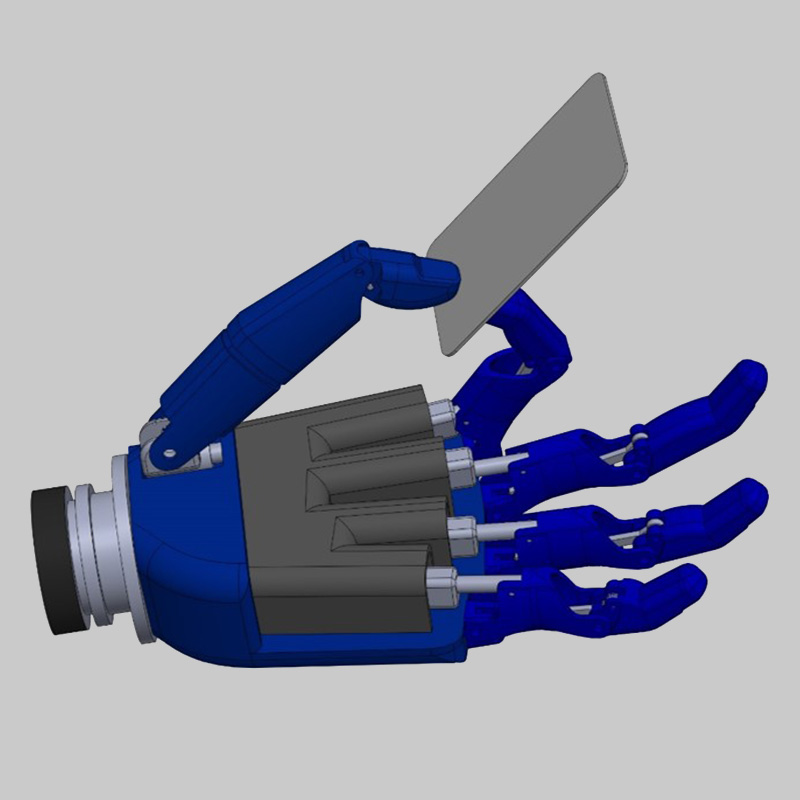
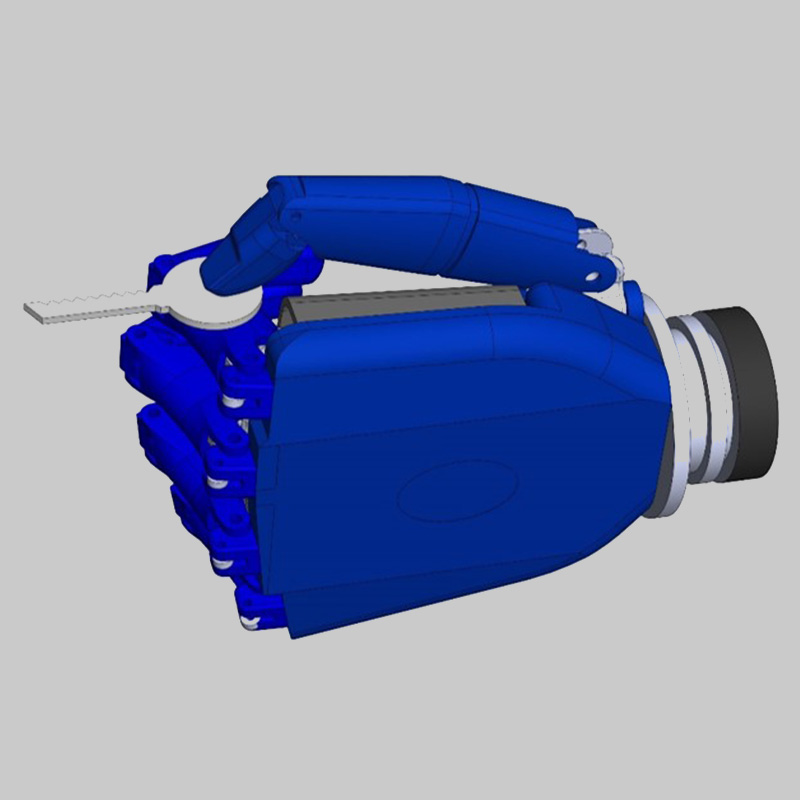
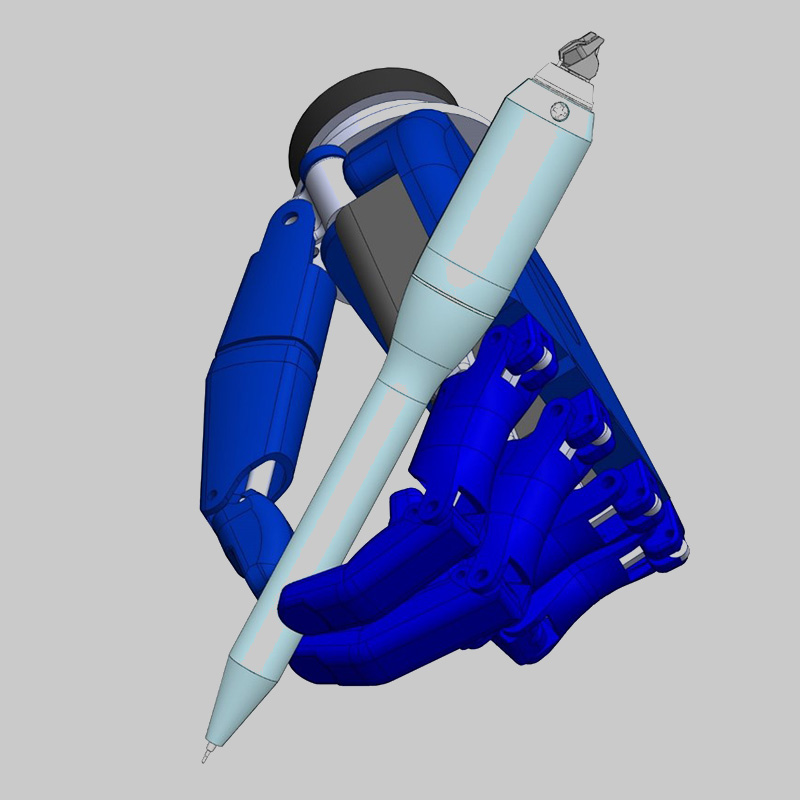
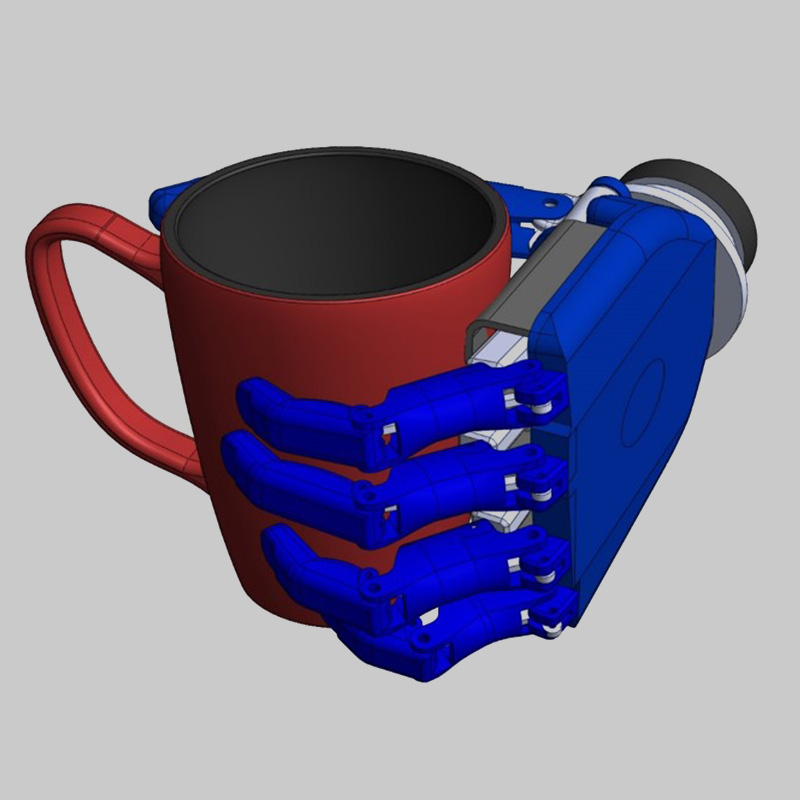
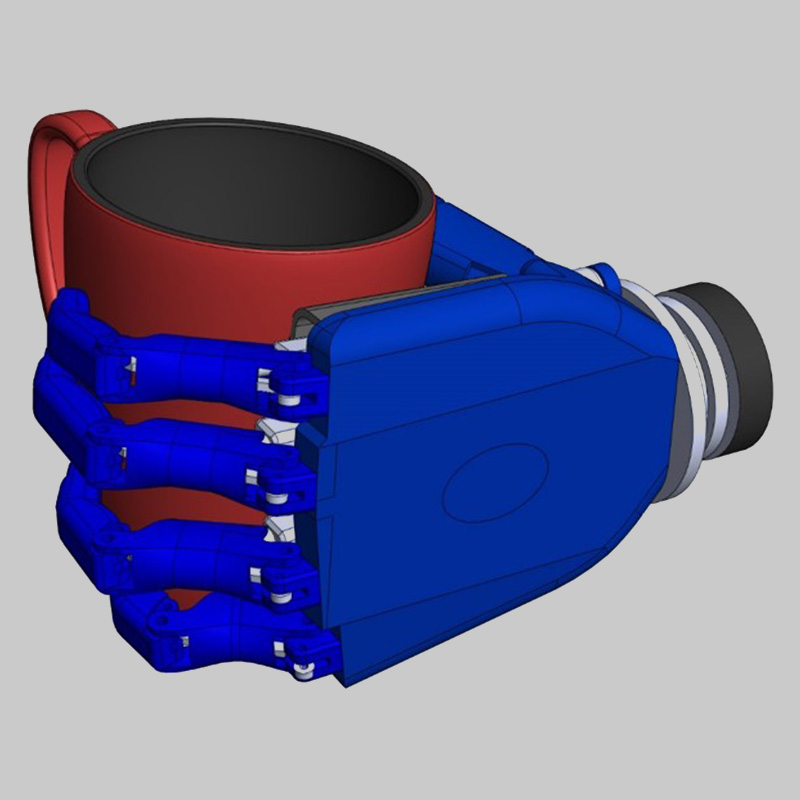
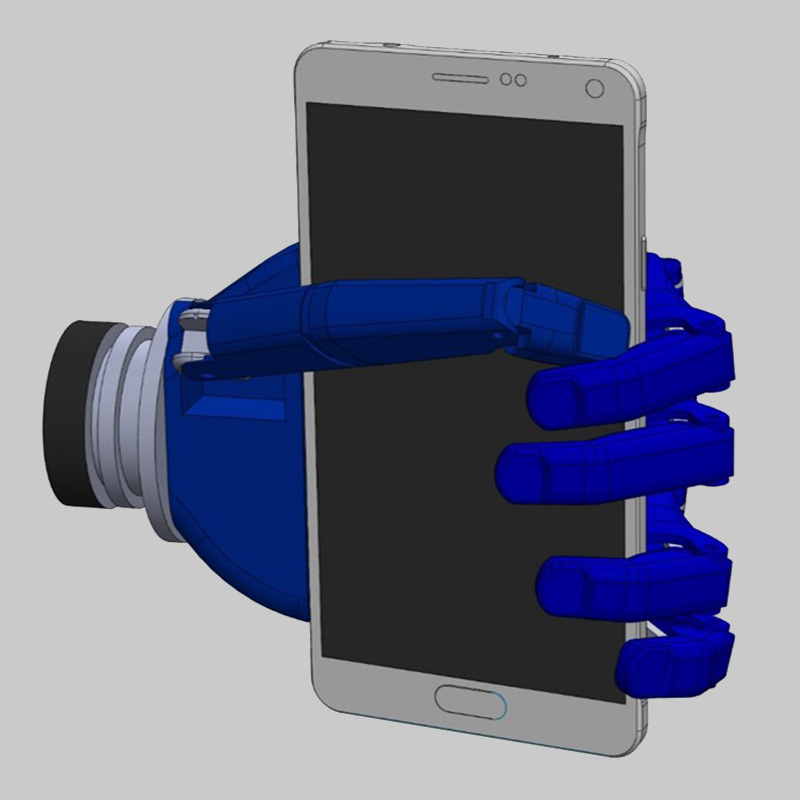
Grip
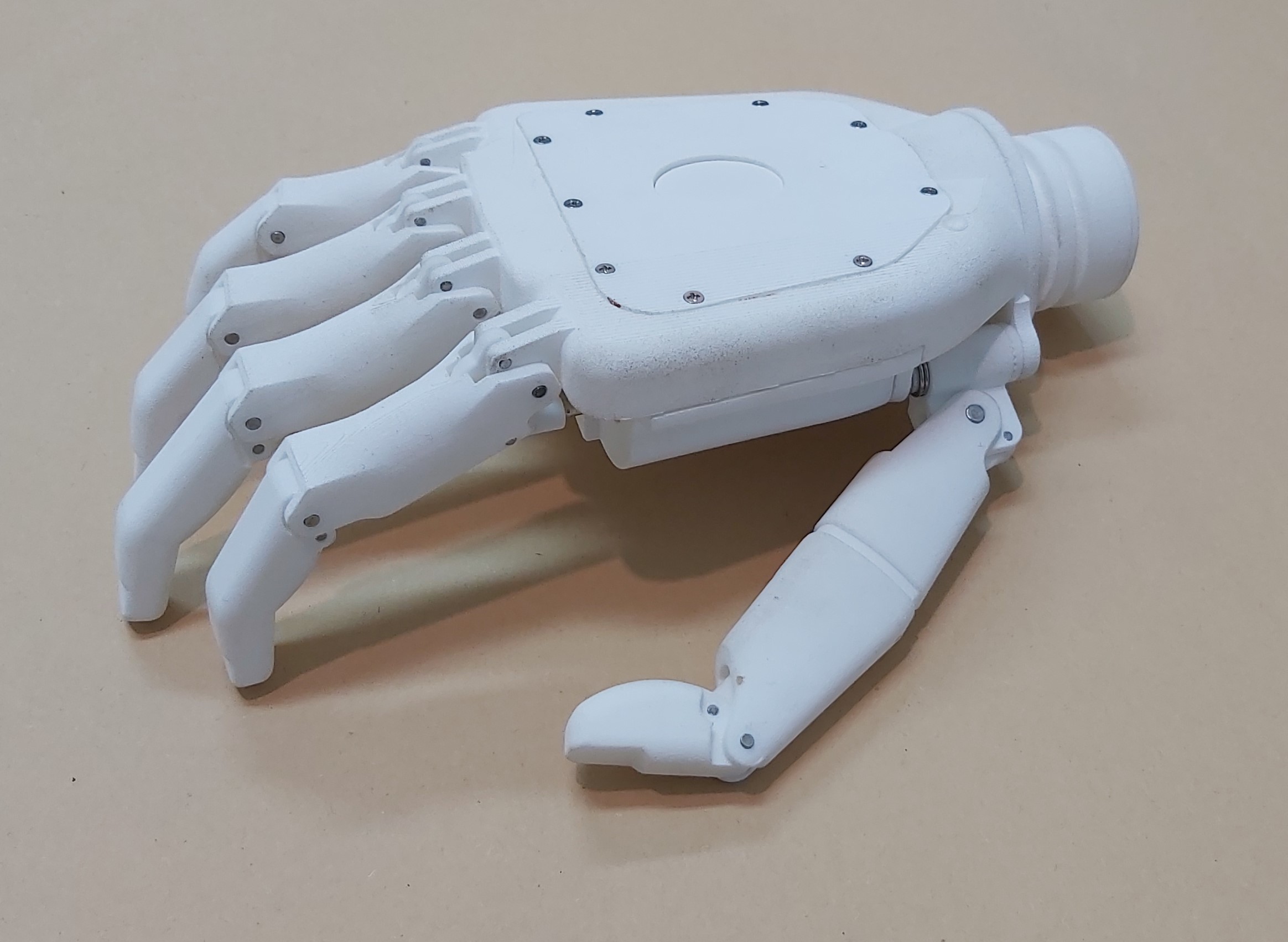
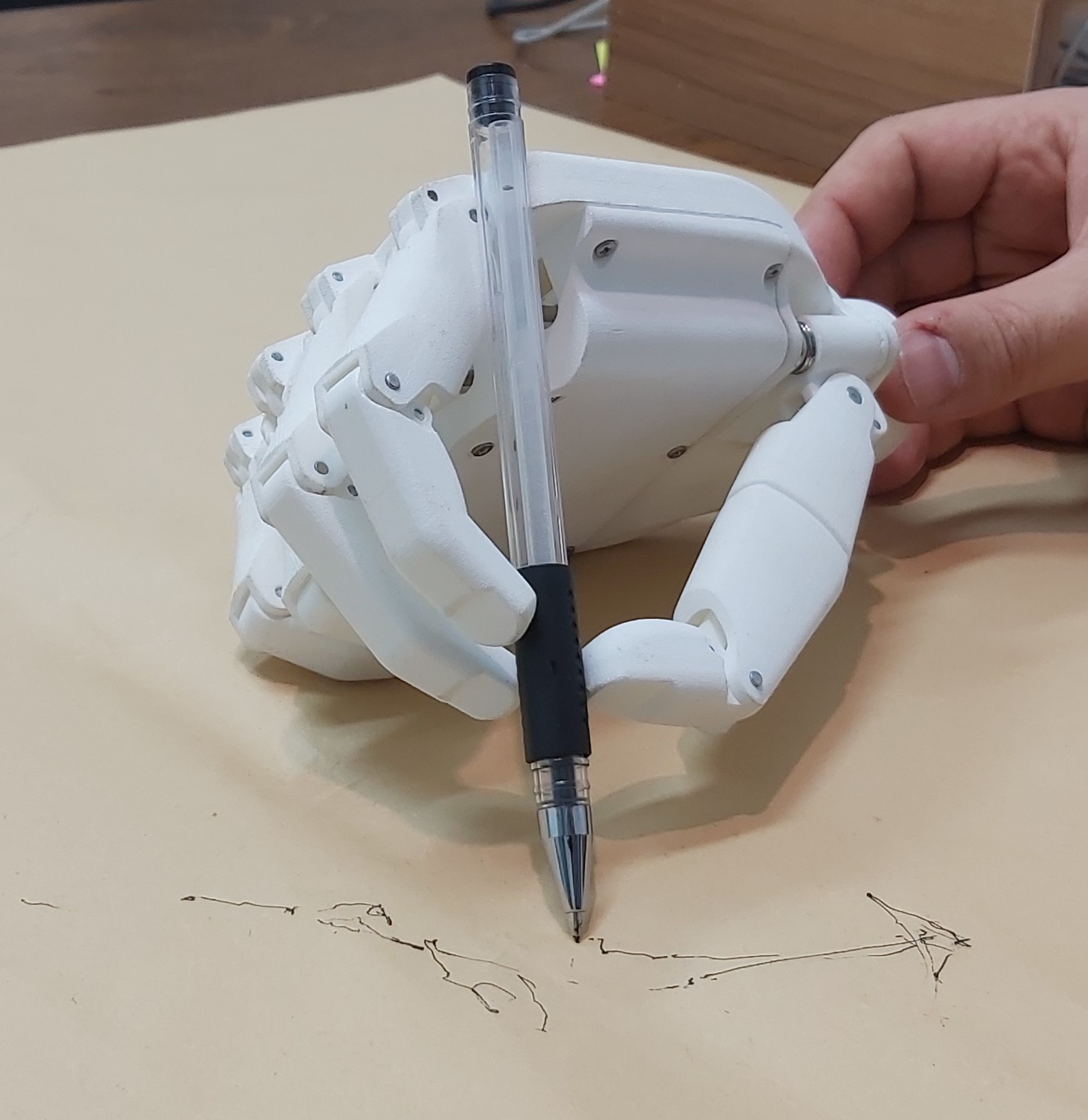
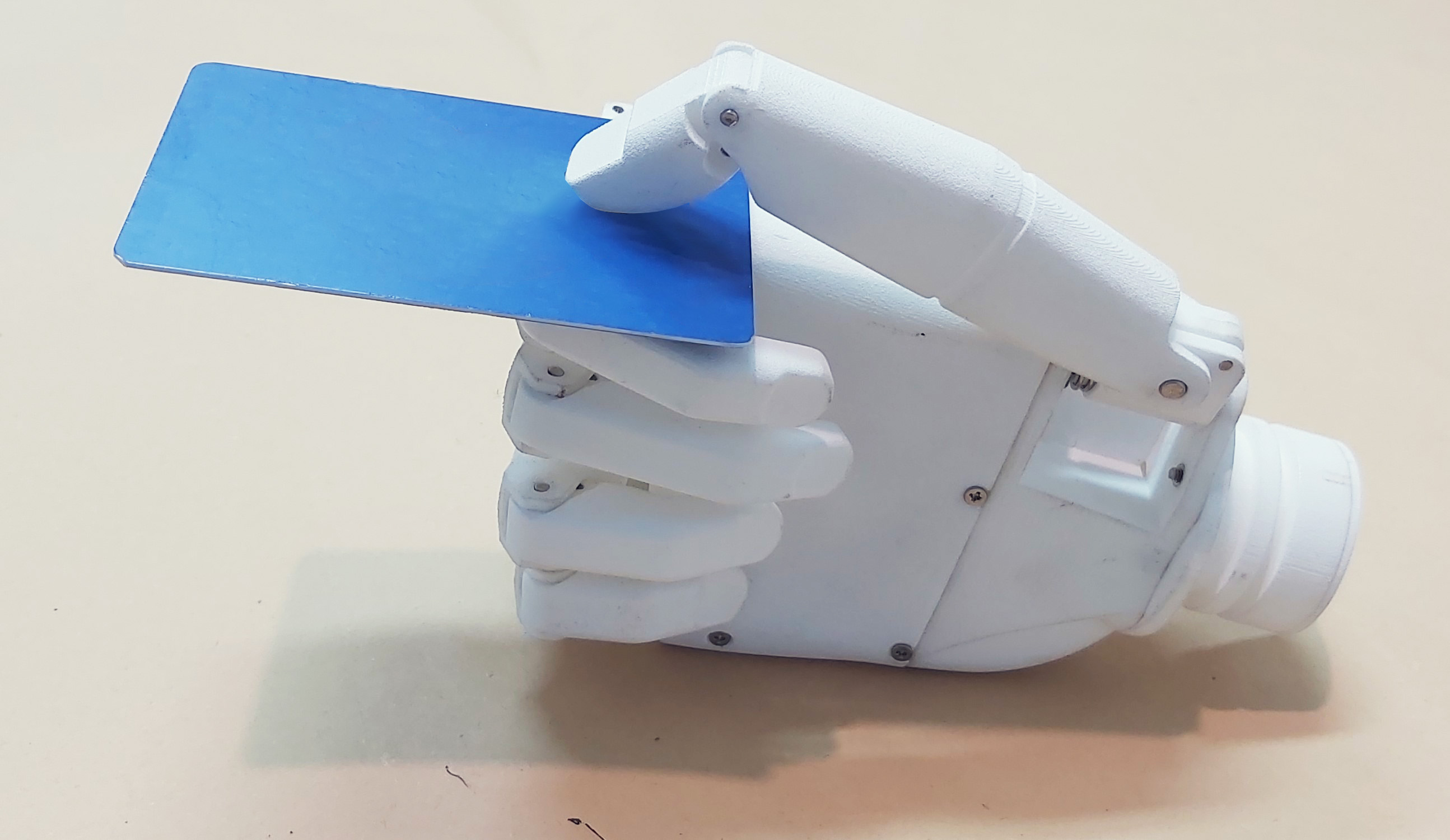
توانایی 14 نوع گرفتن اشیا شامل column grip, finger point, open palm grip, hook grip ,tripod grip, pinch grip, key grip, power grip, active index grip, precision closed grip, mouse grip, relaxed hand position, precision open grip, finger adduction
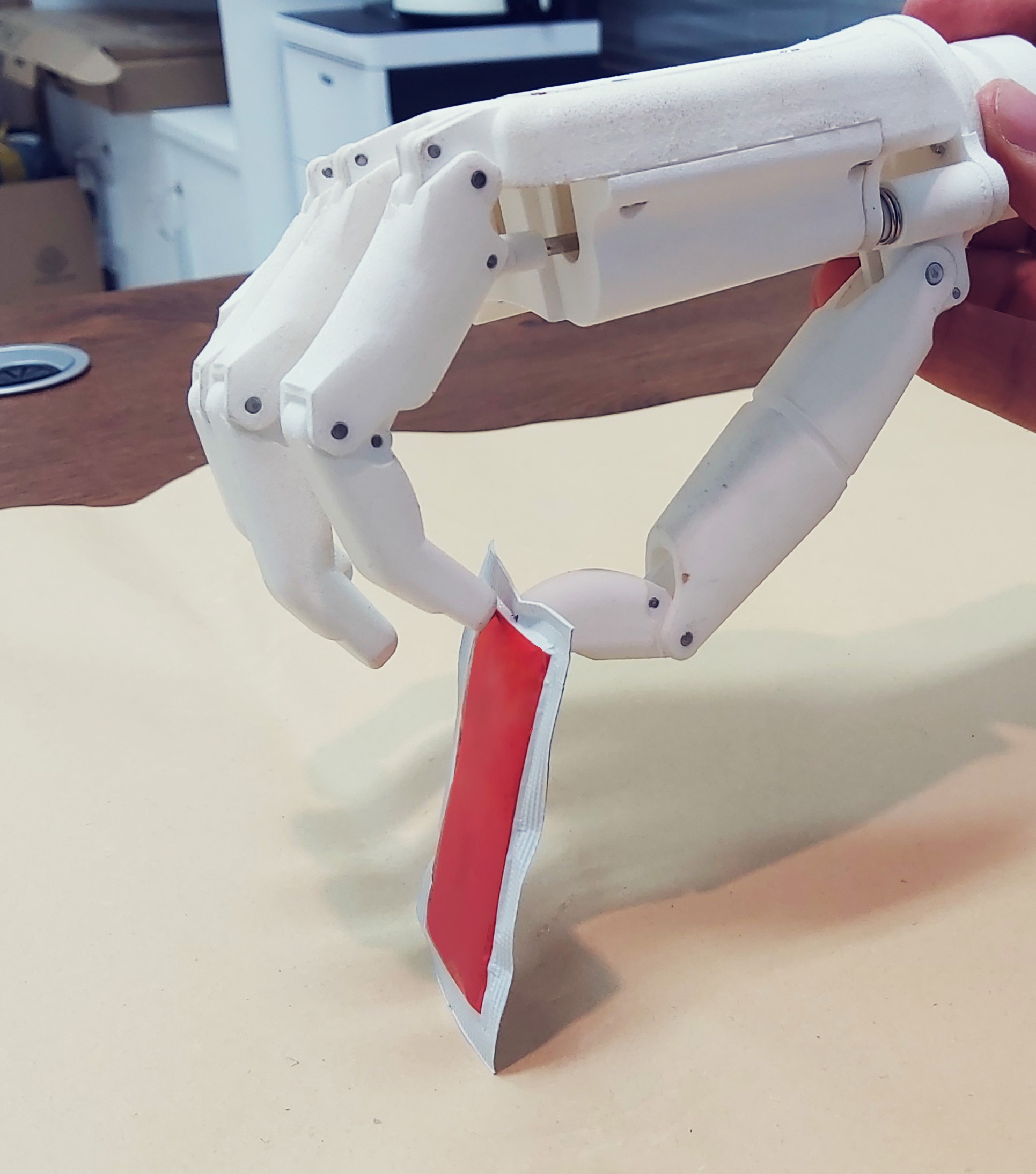
10
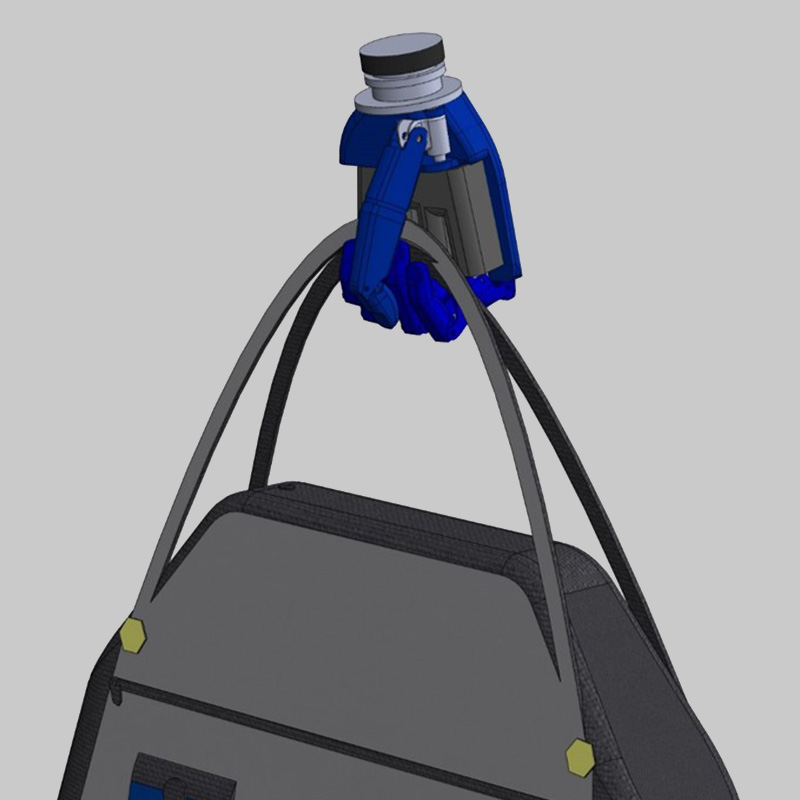
carry (kg)
توانایی حمل 10 کیلوگرم بار در موقعیت Hook
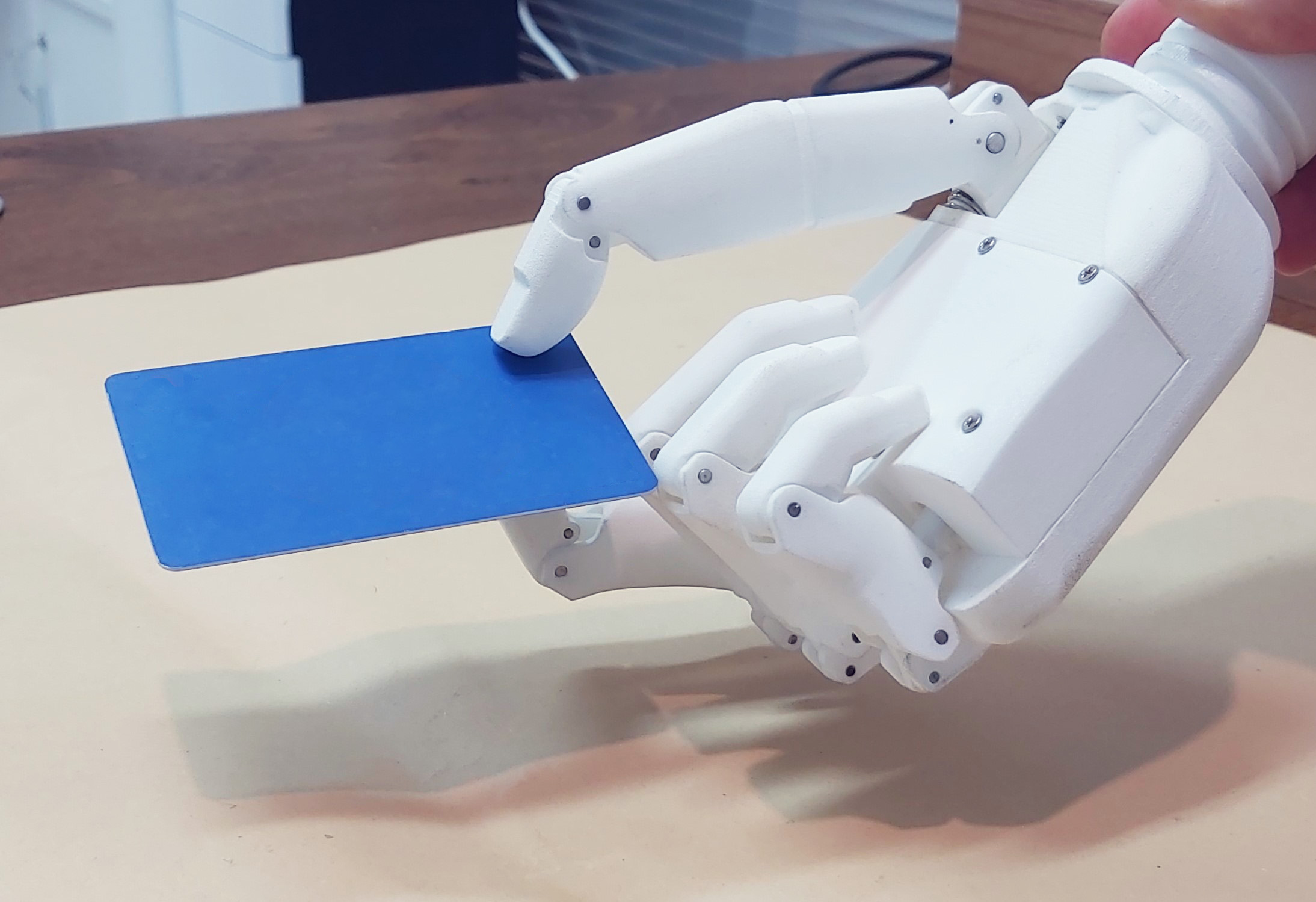
140-230
drg/s
سرعت زاویه ای انگشتان در حدود 140 – 230 درجه در ثانیه
8
DOF
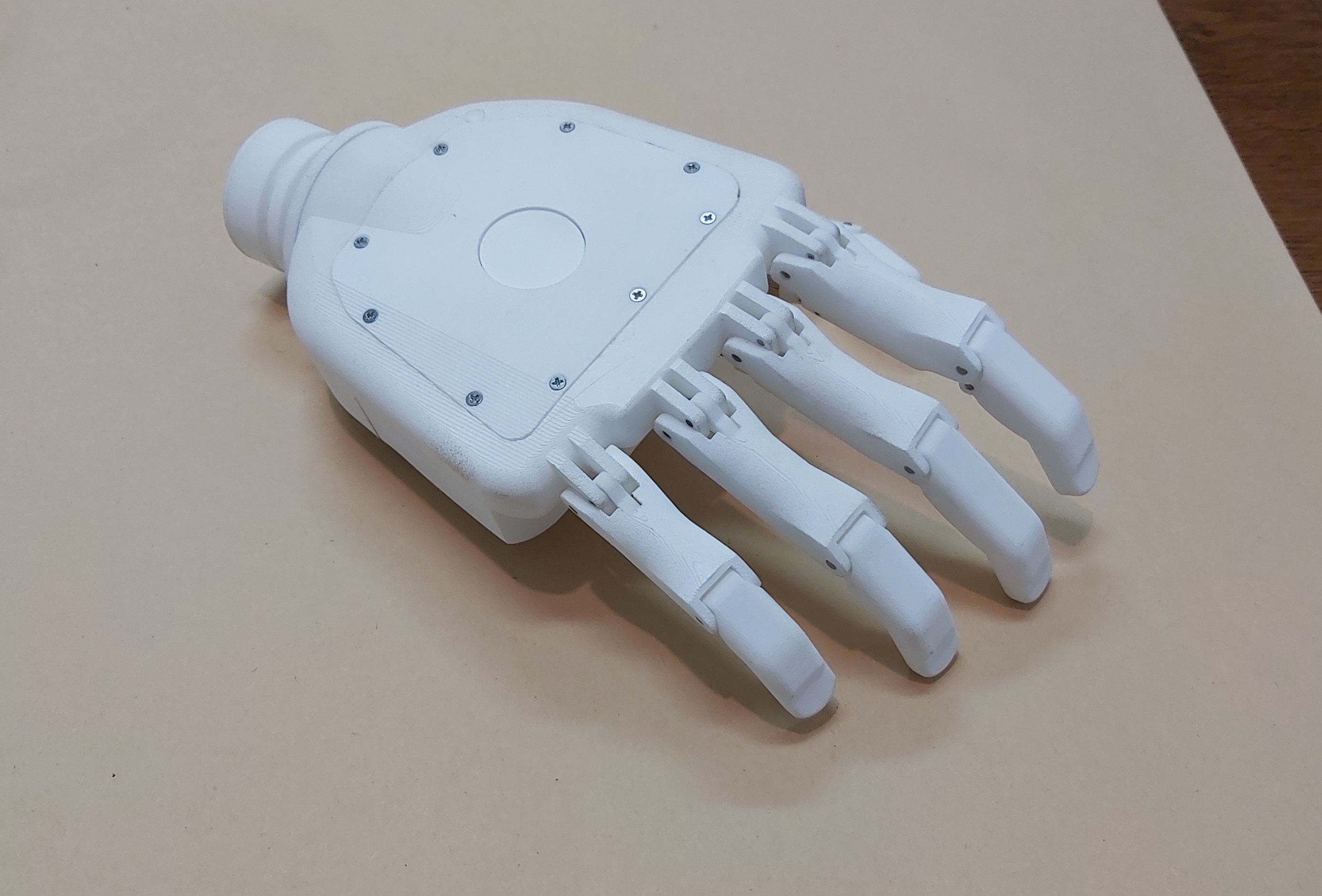
8 درجه آزادی حرکت شامل 2 درجه آزادی حرکت در مچ ،2 درجه در شست و 4 درجه در سایر انگشتان

بکارگیری موتور Brushless

وجود unit Quick-disconnect
10
carry (kg)
توانایی حمل 10 کیلوگرم بار در موقعیت Hook
14
Grip
توانایی 14 نوع گرفتن اشیا شامل column grip, finger point, open palm grip, hook grip ,tripod grip, pinch grip, key grip, power grip, active index grip, precision closed grip, mouse grip, relaxed hand position, precision open grip, finger adduction
140-230
drg/s
سرعت زاویه ای انگشتان در حدود 140 – 230 درجه در ثانیه